Research Notes
Records Before They Became Products
From motion control to inspection UI — things we built and validated ourselves. The structures verified here led to what is now AimFactoryCore.
 NOTE 09
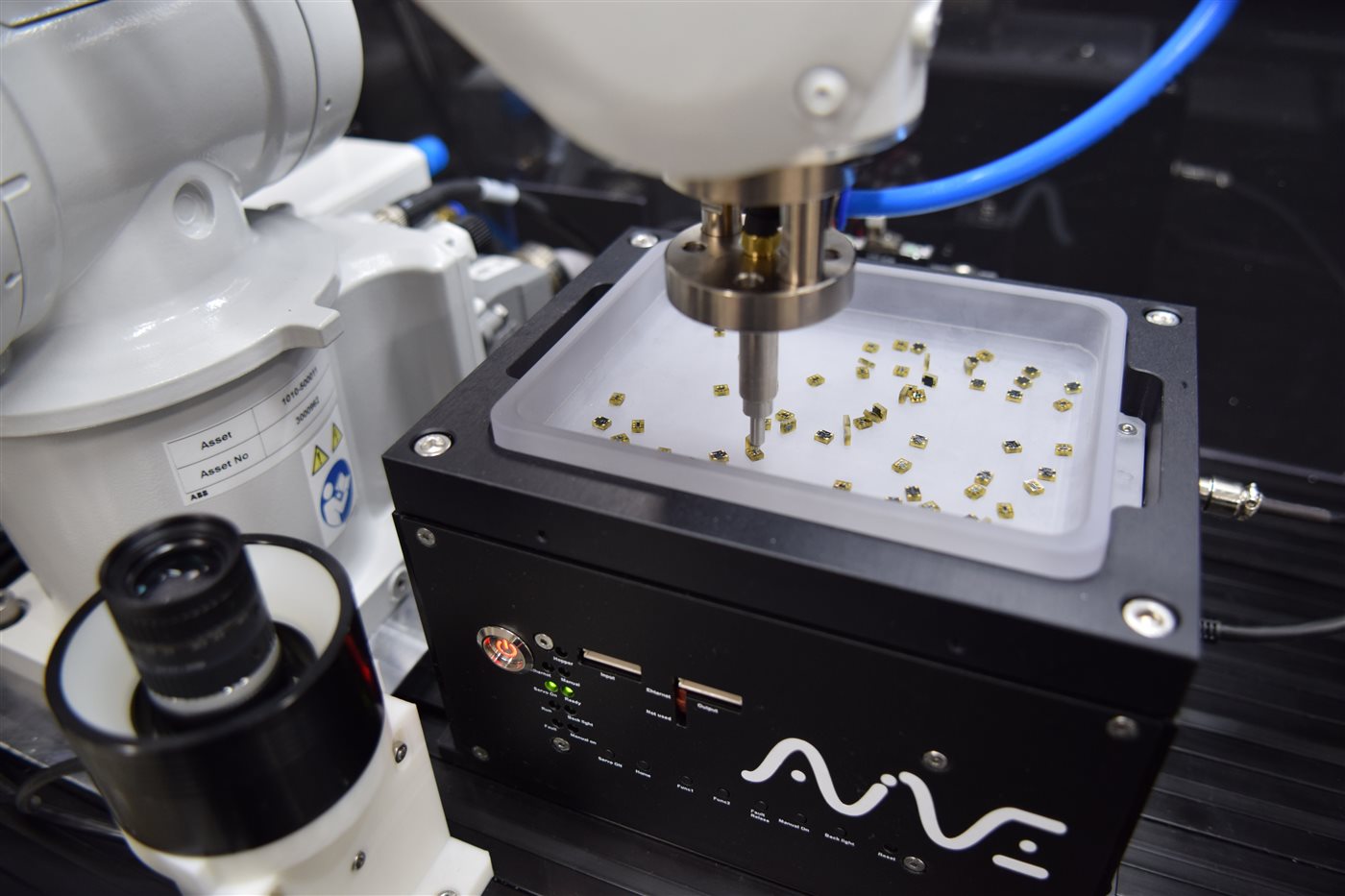
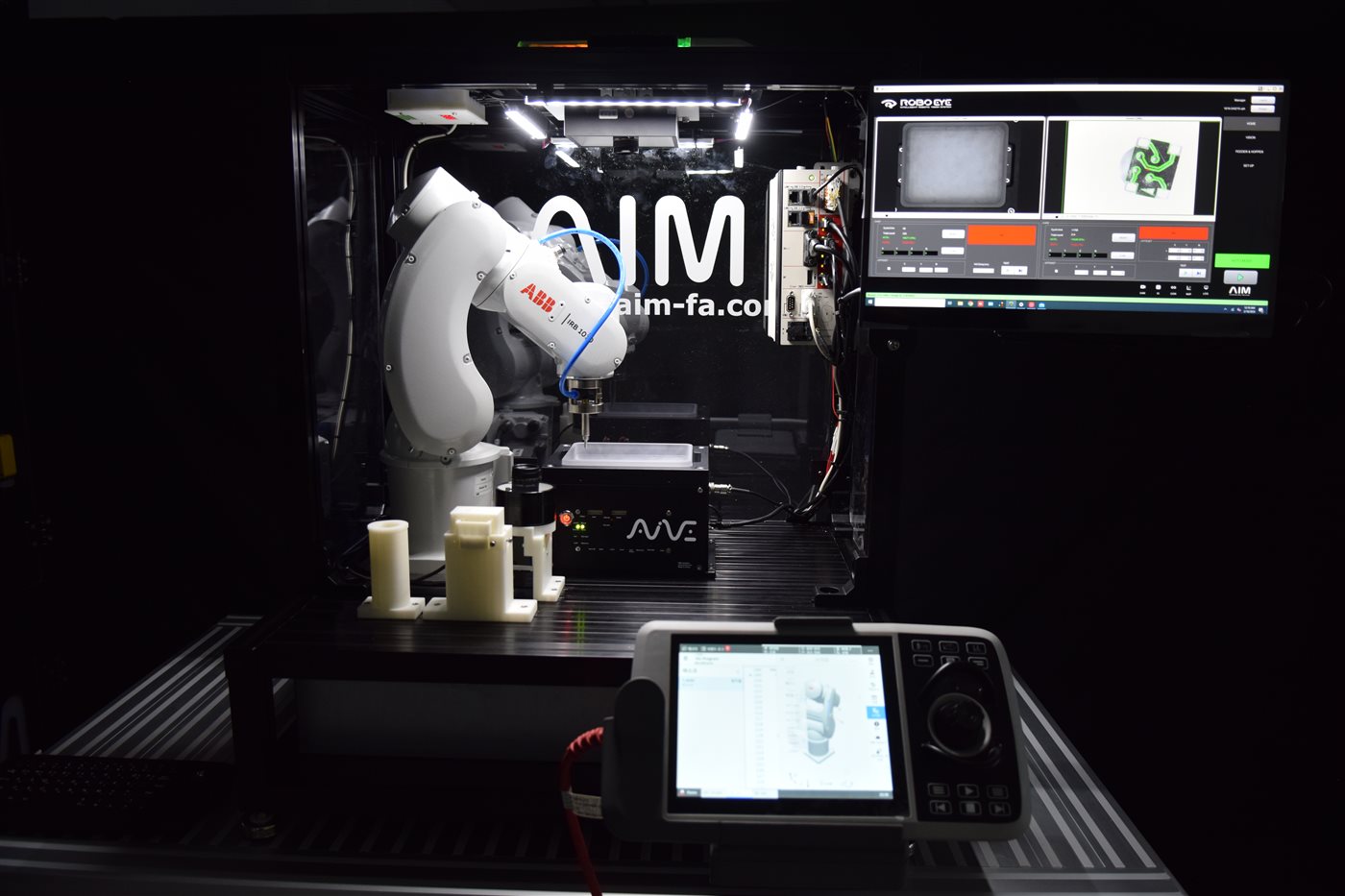
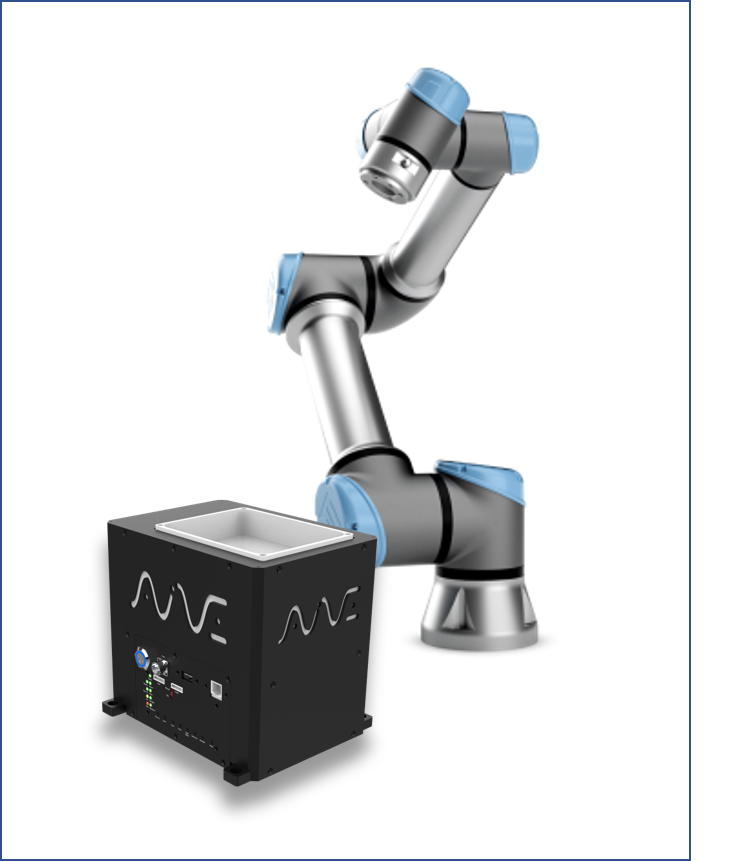
NOTE 09 FEEDERBOT — ABB + AIVE + RoboEye complete cell
A packaged cell integrating an AIVE feeder and RoboEye vision on an ABB IRB-1010. From small-part picking to the UI, it runs as a single system.
- ABB IRB-1010
- AIVE feeder
- RoboEye vision
 NOTE 08
NOTE 08 ABB robot integration — AimFactoryCore plug-in
Verified the TCP/IP communication structure between the ABB IRC5 controller and AimFactoryCore.
- ABB IRC5
- RAPID communication
- TCP/IP socket
 NOTE 07
NOTE 07 EPSON robot integration — RC+ plug-in
A plug-in that reduces RC+'s complex TCP/IP communication to a single line: Call AIVEManual(mm,hz,sec).
- EPSON RC90
- RC+ SPEL+
- TCP/IP Port 201
 NOTE 06
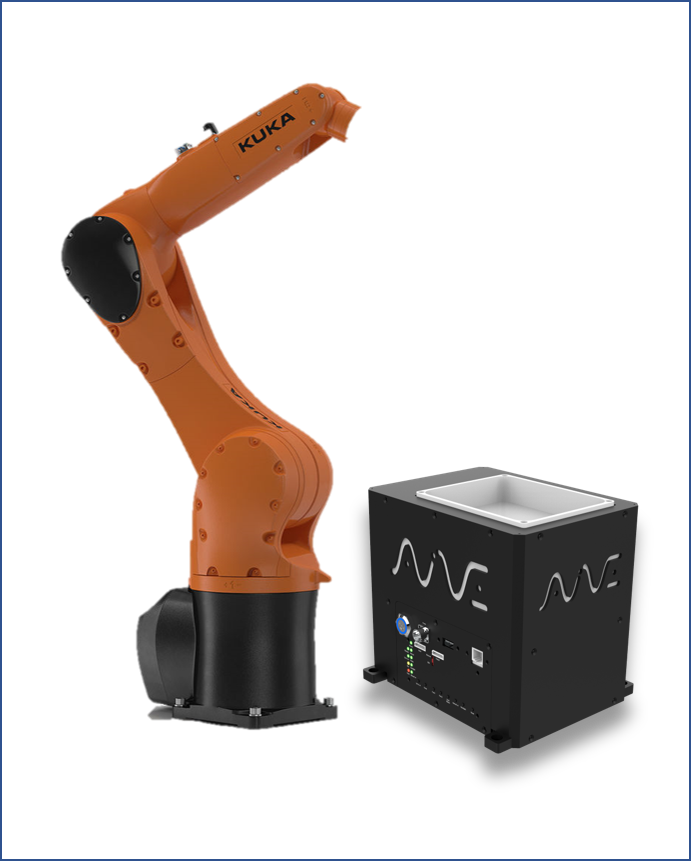
NOTE 06 KUKA robot integration — Ethernet KRL plug-in
Verified controlling AIVE directly via KUKA's EthernetKRL XML configuration and EKI_Send.
- KUKA KRC4
- KRL
- EthernetKRL
 NOTE 05
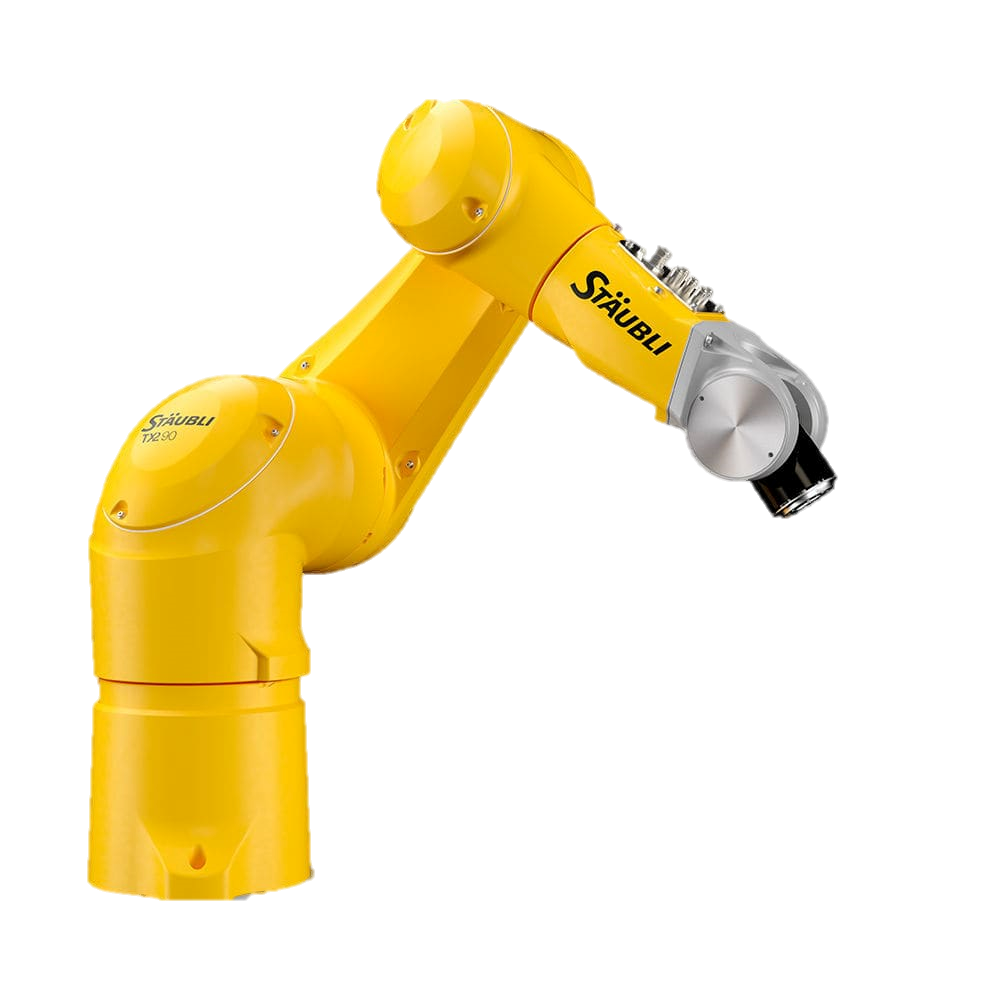
NOTE 05 Stäubli robot integration — VAL3 TCP socket plug-in
Wrapped VAL3 socket communication in a call AiveManual() function to control AIVE and RoboEye from Stäubli.
- Stäubli SP2
- VAL3
- TCP Clients socket
 NOTE 04
NOTE 04 Universal Robots integration — URCaps plug-in
Connect up to four AIVE units simultaneously via PolyScope URCaps, and handle vision height offset inside the UI.
- Universal Robots
- URCaps
- PolyScope
 NOTE 03
NOTE 03 Integrated vision · feeder · robot control software
Working with motor/mechanism specialist Techno Hands, we tied everything from vision to robot motion into one piece of software.
- Elmo motion control
- UDP axis control
- Block-build robot program
 NOTE 02
NOTE 02 IAI Cartesian robot + XSEL — 2-camera precision inspection cell
From rough coordinates to precise corner coordinates with two cameras — inspection-position moves automated.
- IAI Cartesian robot
- XSEL controller
- TCP control
 NOTE 01
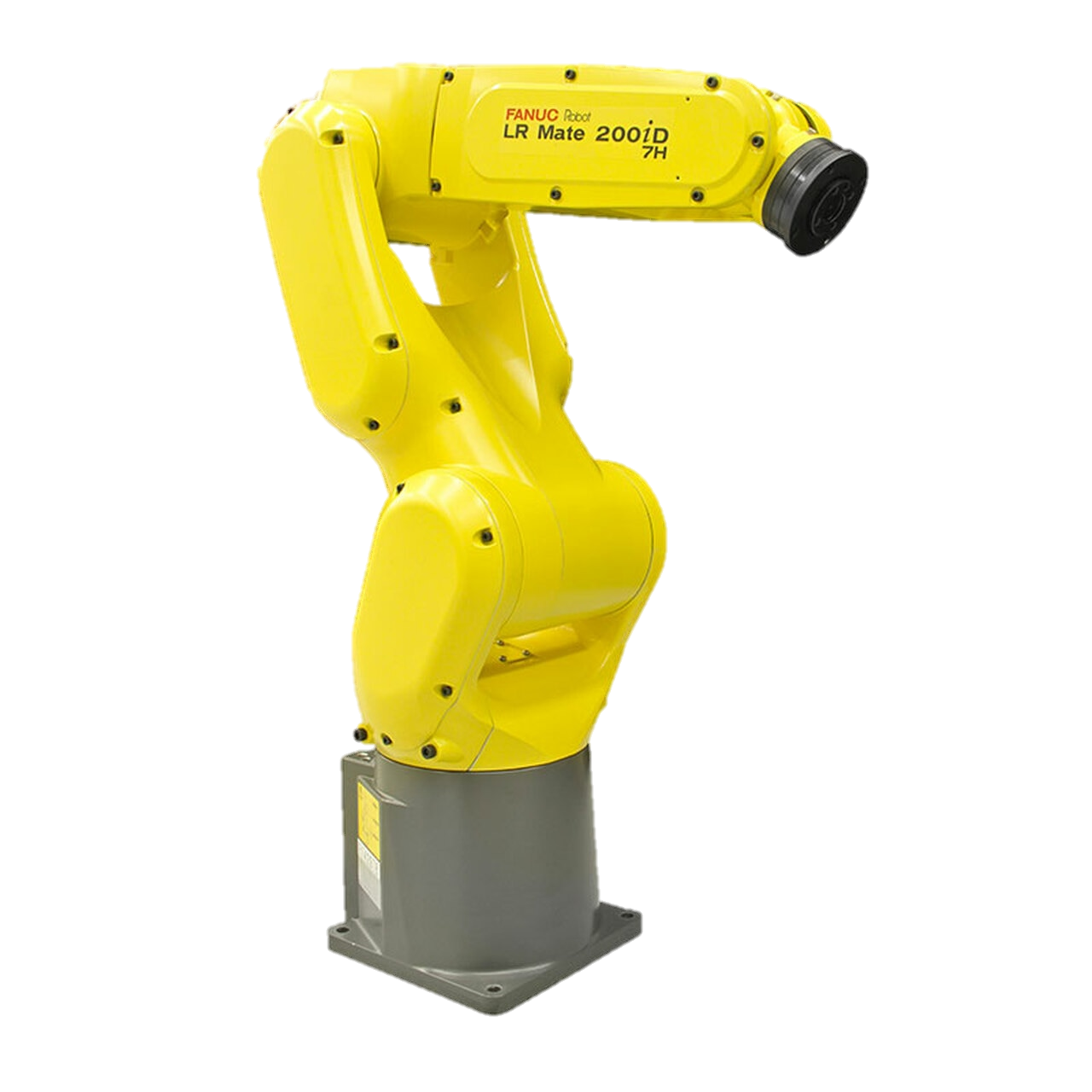
NOTE 01 FANUC integration — early KAREL-based model
An early plug-in structure wrapping AIVE TCP communication in FANUC KAREL. It became the basis of today's AimFactoryCore FANUC integration.
- FANUC KAREL
- Call AIVEReady()
- Call AIVEManual(mm,hz,sec)
This technology is inside our products today
The structures validated in research notes are now part of AimFactoryCore and Robot Suite.