✕ 현장 문제
설정이 3군데에
설정이 3군데에
흩어져 있다
제품 바뀔 때마다 비전 조건·피더 진동·로봇 변수를 각각 따로 수정
→ 레시피 하나로 동시 전환
Why AimFactoryCore
제품 바뀔 때마다 비전 조건·피더 진동·로봇 변수를 각각 따로 수정
→ 레시피 하나로 동시 전환
엔지니어마다 설정 방식이 달라 인수인계 때마다 처음부터
→ 레시피 기반 표준화 운영
새 제품 추가·문제 발생 시 외부 엔지니어 의존
→ 비전·피더·로봇 한 화면에서 해결
How it works
트리거가 들어오면 비전이 보고, 로봇이 집고, 완료를 알립니다. 단계마다 사람이 손댈 필요 없이 한 흐름으로 돌아갑니다.
트리거
PLC·TCP/IP 또는 DI 신호
비전
촬영 → 위치 좌표 산출
로봇
좌표 받아 Pick & Place
완료
DONE → 다음 사이클 준비
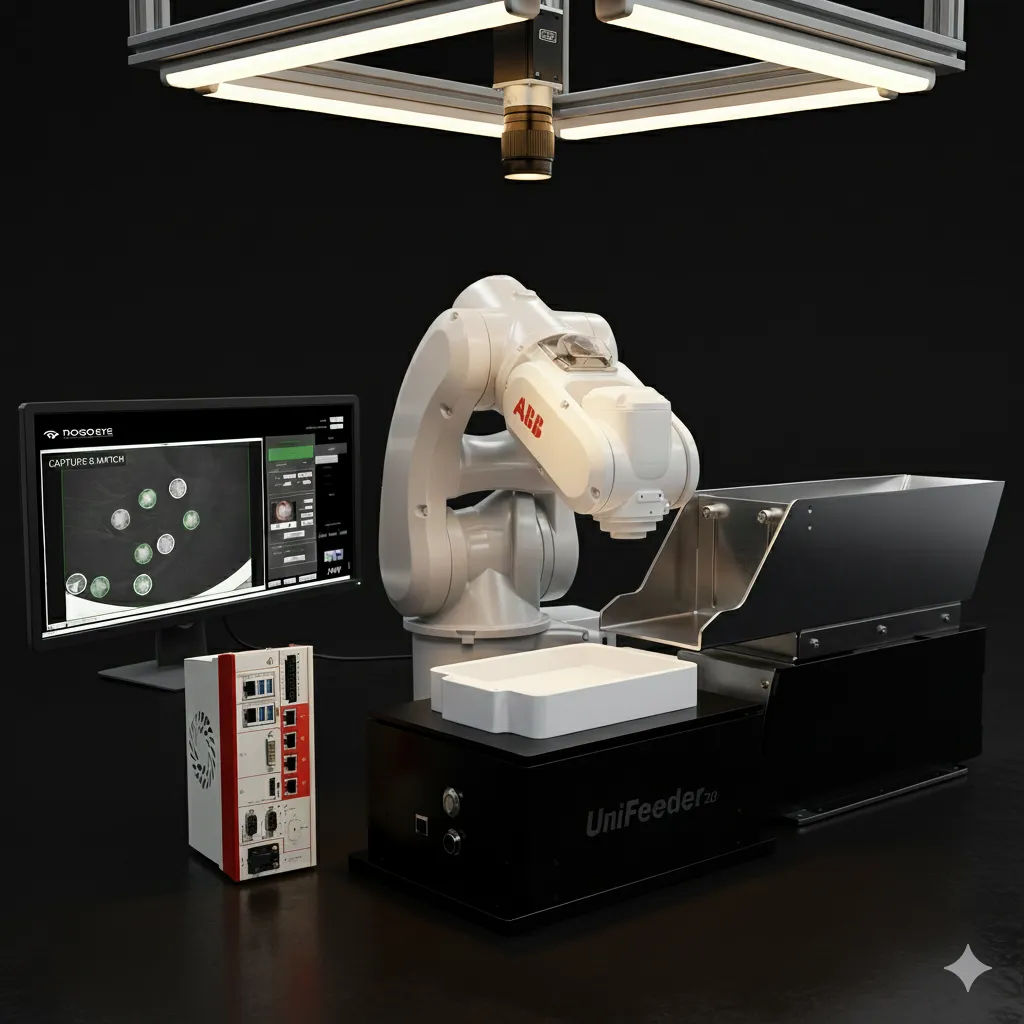
통합 컨트롤러
카메라·로봇·피더·PLC를 통합 컨트롤러 한 곳으로
운영 환경
 Windows 기반
Windows 기반 LAN 연결
Digital I/O
통합 소프트웨어
각 모듈은 독립적으로 동작하면서, 레시피로 묶이면 제품 교체 시 동시에 전환됩니다.
제품 교체 시 비전 조건·피더 설정·로봇 변수를 각각 바꾸지 않아도 됩니다.
레시피 ID 하나를 선택하면 세 가지가 동시에 전환됩니다.
핵심 차별점
제품이 바뀔 때마다 세 곳을 따로 설정하지 않습니다.
레시피 ID 하나로 비전·피더·로봇 조건이 동시에 전환됩니다.
기존 방식
비전 설정 변경
매칭 파라미터, 검사 조건 재조정
피더 재조정
진동 조건, 조명, 호퍼 공급량 재설정
로봇 변수 수정
Pick-up Z, 접근 속도, 내부 변수값 수정
제품 교체 시 각각 3번 작업 — 담당자마다 방법이 달라짐
AimFactoryCore
제품 교체 시
레시피 ID 선택
비전
매칭·검사 조건
피더
진동·조명 조건
로봇
변수·좌표값
동시 전환 — 1번으로 끝
비전 조건
피더 조건
로봇 변수
22+ 로봇 브랜드
직접 운영부터 TCP/IP까지, 3단계 연동 깊이로 모든 브랜드에 대응합니다.
스크립트 편집·변수 읽기/쓰기
DIO 제어·PLC 연동
상태 모니터링·현재 좌표 한 화면에서














ABB · KUKA · UR · FANUC · YASKAWA · Denso · Kawasaki · Stäubli · Yamaha · TM · Mitsubishi · LS · 외 22+ 브랜드 — 좌표 전달 + 상태 연동
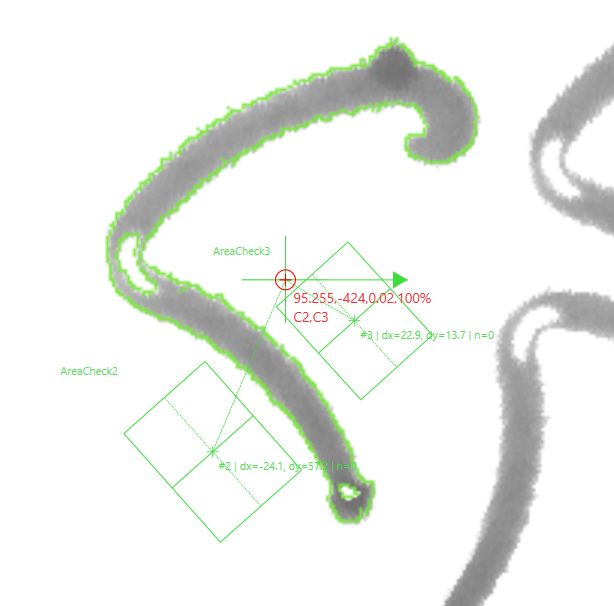
RoboEYE X · 별도 제품
피더 없이, 로봇이 바로 쓰는 좌표를 만드는 로봇 전용 비전 RoboEYE X를 단독·OEM으로 도입할 수 있습니다. AimFactoryCore는 여기에 피더·로봇 운영을 더한 셀 전체 솔루션입니다.
로봇 베이스 좌표 — X·Y·θ 변환까지 완료된 값
카메라–로봇 캘리브레이션 (±0.05 mm 정합)
로봇용 검사 — 그리퍼 간섭·겹침·중심 보정
22+ 로봇 직접 통신
Related Products
피더 라인업과 통합 운영 로봇은 모두 AimFactoryCore 한 화면에서 제어됩니다.

Feeder
UniFeeder
플렉시블 진동 피더

System
AIVE
정렬 피딩 통합 시스템

Parts Feeder
FlexiBowl
회전형 플렉시블 피더
.png)
Industrial Robot
HD현대로보틱스
통합 운영 산업용 로봇
Applications
제품 전환이 잦고 조건 관리가 복잡한 자동화 공정에 적합합니다.
.jpg)

