ROBOT SUITE
Agilibot × AimFactoryCore
통합 운영
TCP/IP로 Agilibot 컨트롤러와 직접 연결해 로봇 상태 모니터링, 좌표 읽기·쓰기, 알람 수신, JOB 제어를 비전 화면 하나에서 처리합니다.
HOW IT CONNECTS
컨트롤러와 직접 연결
Agilibot 컨트롤러는 TCP/IP 소켓 통신을 지원합니다. AimFactoryCore는 이더넷으로 직접 연결해 별도 드라이버 없이 로봇 상태·좌표·알람을 실시간으로 수신합니다.
비전 PC
AimFactoryCore
TCP/IP
이더넷 직접 연결
Agilibot 컨트롤러
192.168.x.x
로봇 동작
좌표·JOB 실행
통신 방식
TCP/IP 소켓 — 이더넷 직접 연결
갱신 주기
1초 주기 — 상태·좌표 실시간 수신
좌표 포맷
TCP mm/deg — X/Y/Z/Rx/Ry/Rz
FEATURES
Agilibot에서 할 수 있는 것
로봇 상태 실시간 모니터링
연결 상태, Motor·E-STOP·속도·IDLE 여부, Main JOB 로드 상태를 1초 주기로 갱신해 비전 화면에서 바로 확인합니다.
좌표 읽기·쓰기
TCP 월드 좌표(X/Y/Z/Rx/Ry/Rz)를 비전 소프트웨어에서 직접 읽고 씁니다. 비전 인식 결과를 로봇이 바로 사용할 수 있는 포맷으로 전달합니다.
컨트롤러 알람 수신·기록
알람 코드와 발생 시각을 자동으로 수집합니다. 현장 엔지니어가 비전 화면에서 원인을 즉시 확인하고 대응할 수 있습니다.
JOB 로드·실행 제어
AimFactoryCore 파일을 Agilibot 컨트롤러에 로드하고 실행합니다. 티치 펜던트 없이 PC에서 운영 가능합니다.
레시피별 변수 통합 관리
다품종 생산 시 모델마다 다른 로봇 변수를 비전 레시피에서 함께 관리합니다. 모델 전환 시 레시피 선택만으로 로봇 변수도 자동 전환됩니다.
TCP/IP 직접 연결
이더넷으로 Agilibot 컨트롤러에 직접 연결합니다. 별도 드라이버·미들웨어 없이 IP 주소 설정만으로 연동됩니다.
ACTUAL SCREENS
실제 운영 화면
Agilibot과 AimFactoryCore가 연결된 실제 화면입니다.
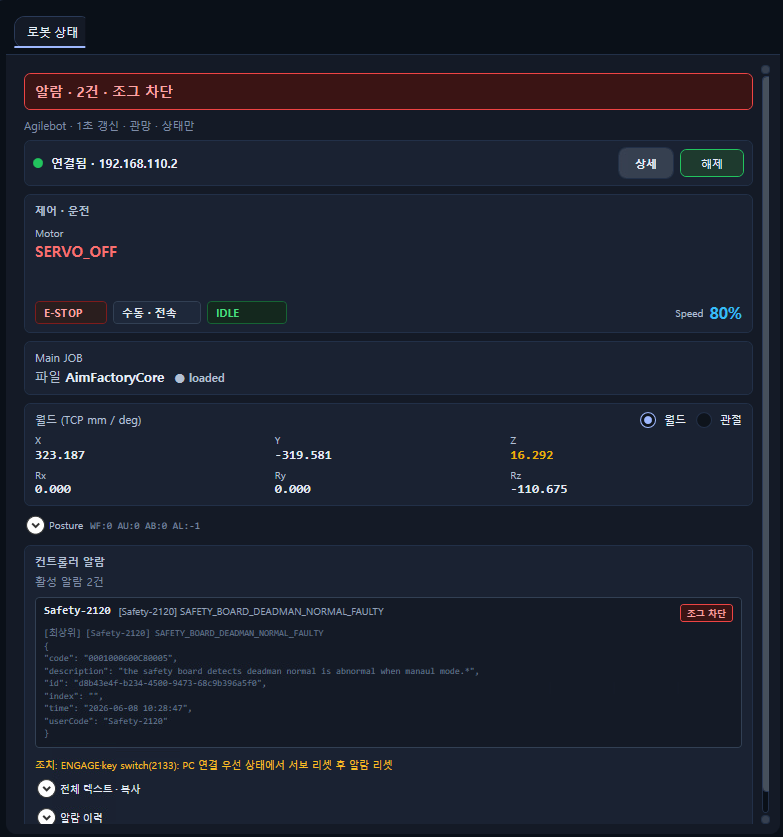
로봇 상태
연결 상태, Motor ON/OFF, E-STOP, 속도, Main JOB, 컨트롤러 알람을 한 화면에서 확인합니다.

실시간 좌표
TCP 월드 좌표(X/Y/Z/Rx/Ry/Rz)와 관절 좌표를 실시간으로 모니터링합니다.
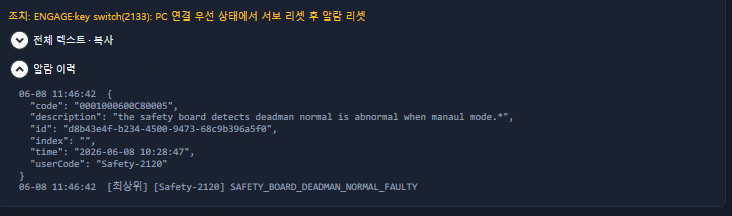
알람 이력
컨트롤러 알람 코드·내용·발생 시각을 기록합니다. 문제 원인 파악과 대응이 빠릅니다.
BEFORE / AFTER
Agilibot 운영 — 적용 전과 후
로봇 상태 확인 시
펜던트로 이동해서 확인. 비전 화면과 로봇 화면을 오가며 원인 파악.
비전 화면에서 로봇 상태·알람·좌표를 한 번에 확인. 대응 속도가 빠릅니다.
좌표 전달 시
비전 결과를 메모하거나 별도 프로그램으로 변환 후 수동 입력.
비전 인식 결과가 Agilibot 포맷으로 자동 변환·전달. 사람 개입 없이 처리됩니다.
다품종 전환 시
모델마다 로봇 변수를 수동으로 변경. 전문가가 필요합니다.
비전 레시피 선택 한 번으로 로봇 변수까지 자동 전환됩니다.
VIDEO
Agilibot 동작 영상

Agilibot 로봇 동작 영상
GET STARTED
Agilibot 연동 문의
보유하신 Agilibot 모델과 컨트롤러 버전을 알려주시면 연동 가능 여부를 검토해 드립니다.