Flexible Feeding
多品種部品のためのフレキシブルフィーディングシステム
オペレーターなしで多品種部品を自動供給。パーツフィーダー・ボウルフィーダーを置き換えるフレキシブルフィーディング — 0.5〜180 mm の部品をビジョンで整列し自動でピックアップします。
01
フレキシブルフィーダーとは?
分散(振動・回転)・認識(ビジョン)・座標整合(キャリブレーション)を 標準化し、1台の装置で多様な部品を供給してピックの再現性を確保します。
02
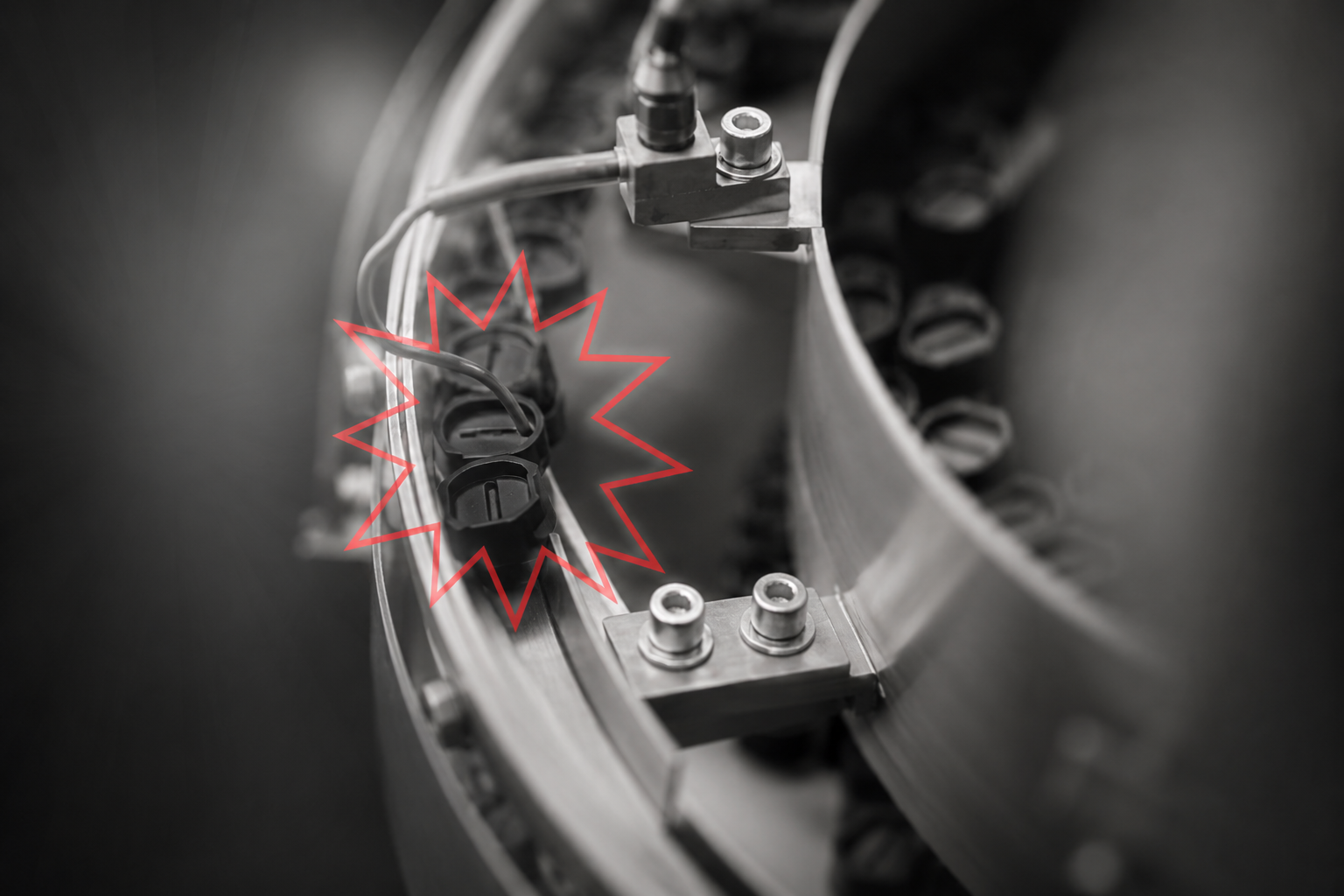
100年間解決されなかった課題
部品の供給方法は、産業革命以来 本質的に変わっていません。
- 1870
第2次産業革命
大量生産方式の導入 — 手作業

- 1960
第3次産業革命
ボウルフィーダー・振動フィーダーの開発
現在も
依然としてフィーダー、あるいは人
少品種多量生産
ボウル/振動フィーダーで解決可能
多品種少量生産
人が手で整列 — 自動化のギャップ
New Solution Needed
モデルが変わっても5分以内で切り替え、
オペレーターなしで多品種部品を供給できること。
フレキシブルフィーダーは、振動による分散 + ビジョン認識 + レシピ切り替えでこのギャップを埋めます。
03
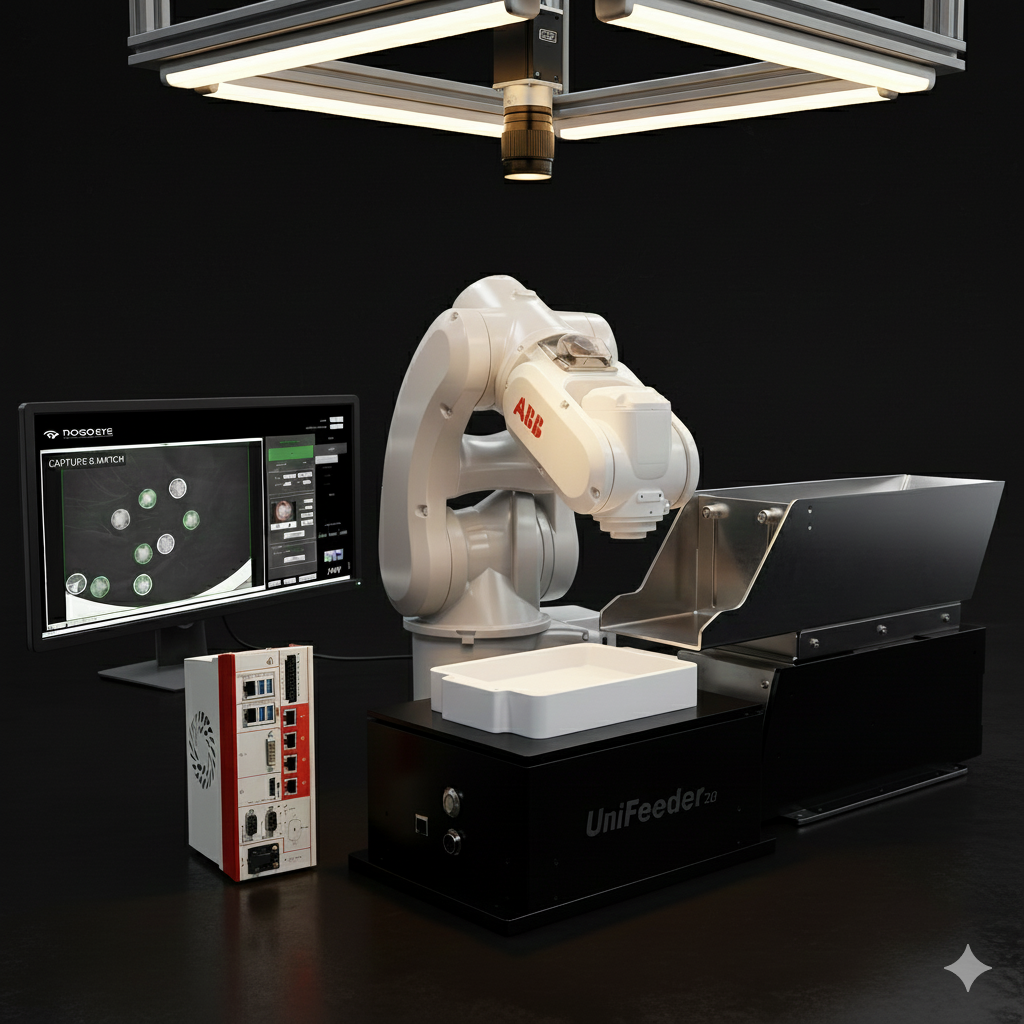
生産人員を置き換える無人自動化
山積みの部品を人のように1つずつ — ロボットが腕を、カメラビジョンが目を、統合制御が判断を 置き換えます。

腕を置き換えるロボット
整合された座標で、ピックアップ・搬送を正確に繰り返します。
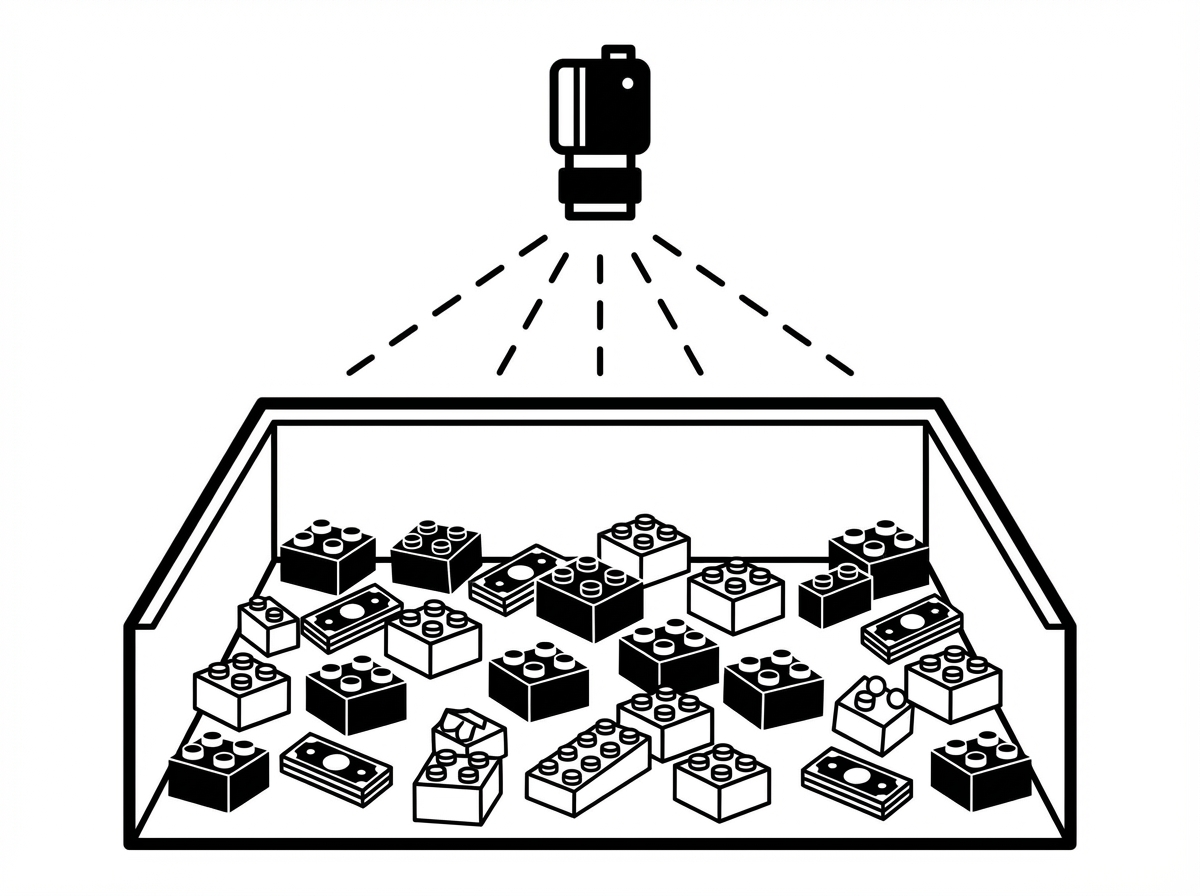
目を置き換えるカメラビジョン
部品の位置・姿勢をリアルタイムで認識し、座標を転送します。
知能を置き換える統合制御
レシピ1つで、モデル切り替えと条件管理を自動化します。
04
バルク → ピックアップまで、5ステップのフローと担当製品
各ステップの標準化パラメータを レシピ として保存し、モデル変更時に一括で切り替わります。
-
 01 バルク
01 バルク部品がランダムに混ざった状態から始めます。
-
 02 投入
02 投入ホッパー/トレイでフィーダーに供給し、一定量を維持します。
-
 03 分散
03 分散振動パターンで広げ、重なり・干渉を減らします。
-
 04 認識
04 認識ビジョンが姿勢・中心座標・干渉を計算します。
-
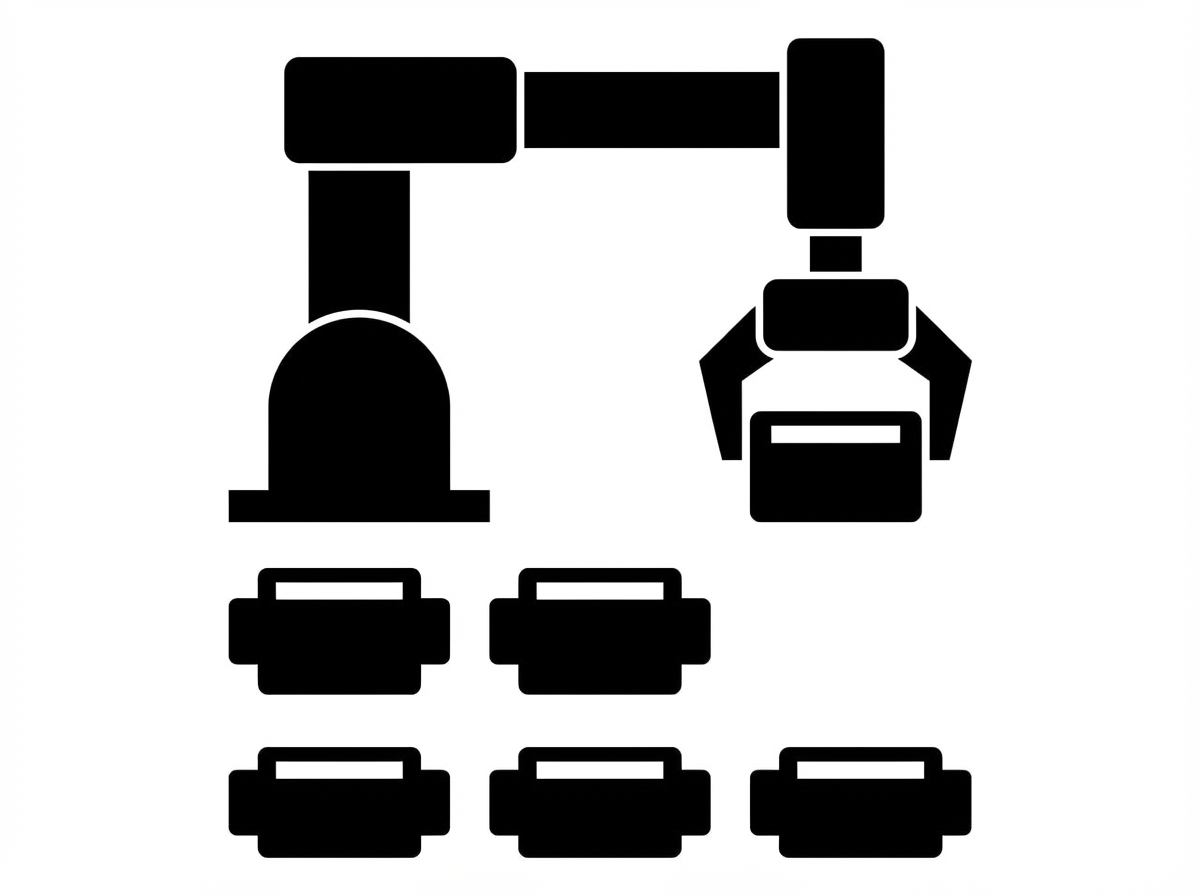 05 ピック&プレース
05 ピック&プレース整合された座標でロボットがピックアップ・配置します。
Product Line
フレキシブルフィーディングを構成する製品ファミリー

UniHopper
大容量部品の保管・供給
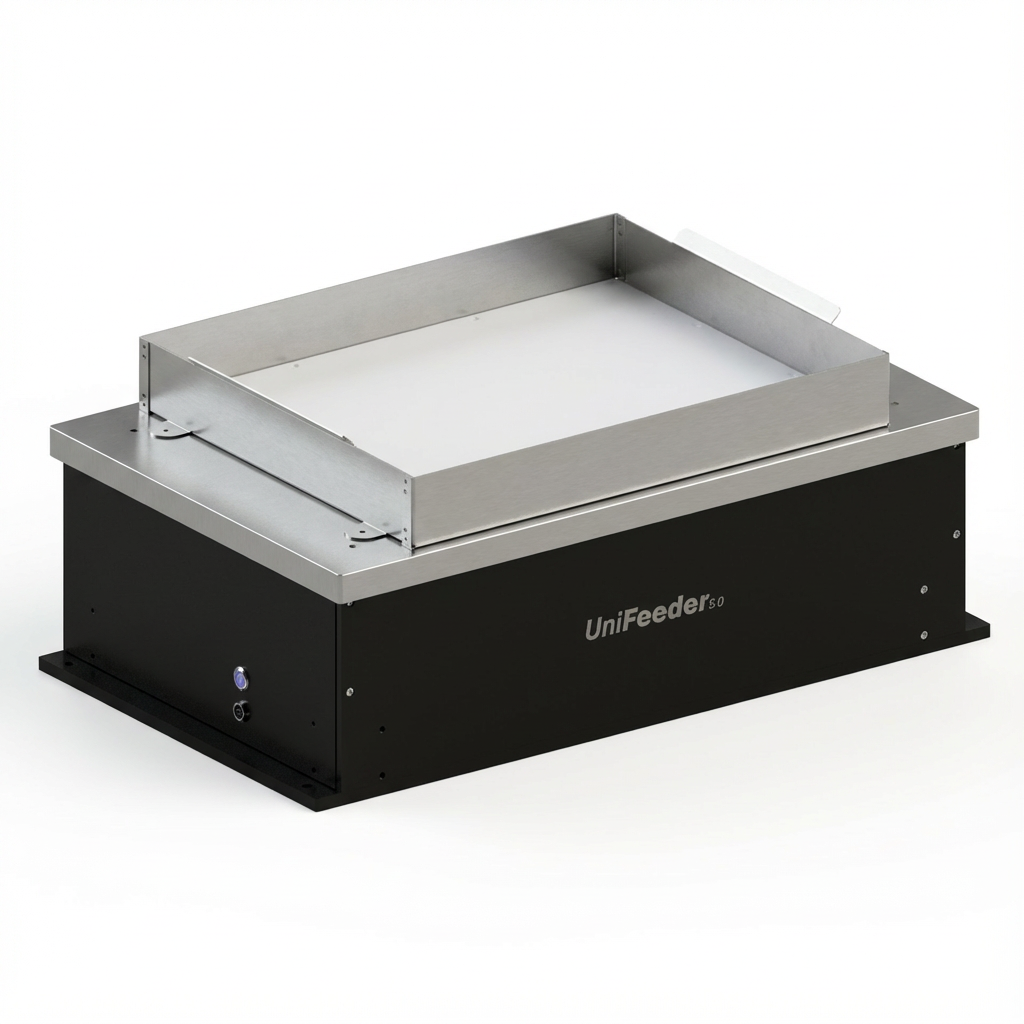
UniFeeder
振動による部品の分散

Vision Engine
ビジョン認識・座標整合
AIMFactoryCore
統合制御・レシピ管理
05
システム構成
ソフトウェア・ビジョン・フィーダーで構成されます。詳細仕様は各製品ページをご覧ください。
AIMFactoryCore
レシピ・ビジョン・装置制御・モデル切り替えを統合運用します。
製品を見る →
UniFeeder
振動式フレキシブルフィーダーで多品種部品を安定供給します。
製品を見る →
AIVE
精密フィーディング統合システムでフィーダー・ビジョン・制御を1つに構成します。
製品を見る →
FlexiBowl
回転式フレキシブルパーツフィーダーで多様な部品形状に対応します。
製品を見る →
導入事例
実際の部品・ロボット・ラインで適用した事例です。

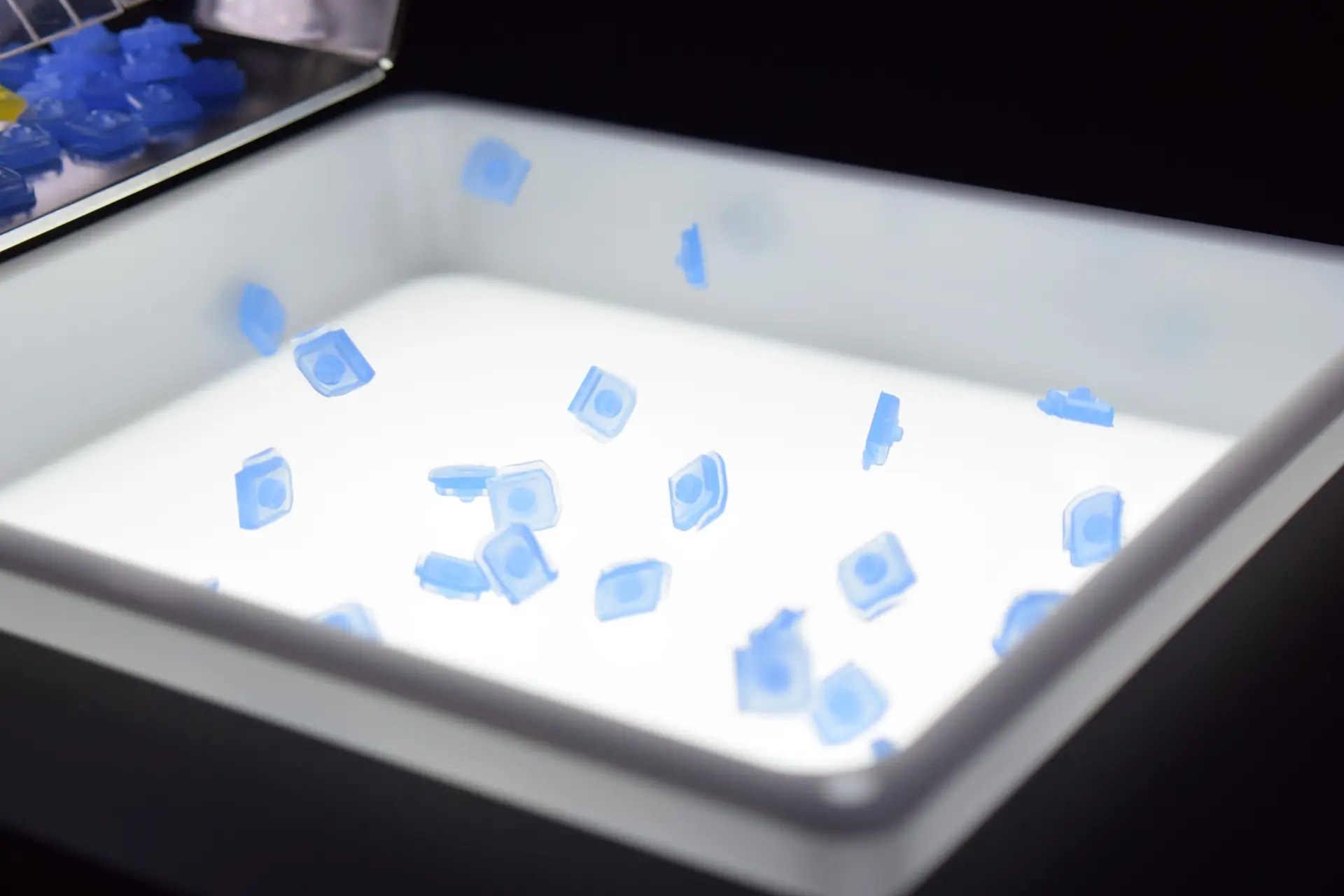
Electronic-parts manufacturing · Undisclosed (silicone parts)
Silicone part tray auto-feeding with AIVE + RoboEYE (4×6 mm)
事例を見る →

Electronic-parts manufacturing · IAI Robotics
Ultra-small SMD reel-taping automation with IAI robot, AIVE & RoboEYE
事例を見る →
Automotive parts · Hyundai Heavy Industries
Hyundai Robotics HH7 case study | Flexible feeder & machine-vision automation
事例を見る →