✕ 現場の課題
設定が3か所に分散している
製品を変えるたびに、ビジョン条件・フィーダー振動・ロボット変数を別々に編集する必要がある。
→ レシピ1つですべてを一括切り替え
統合コントローラー · 統合ソフトウェア
ビジョンだけ、フィーディングだけ、ロボットだけ、という会社はたくさんあります。
AimFactoryCore はカメラ・フィーダー・ロボット・PLC の信号を1つの統合コントローラーに集約し、 統合ソフトウェアでビジョン・フィーダー・ロボット・レシピを1画面から運用します。

Why AimFactoryCore
製品を変えるたびに、ビジョン条件・フィーダー振動・ロボット変数を別々に編集する必要がある。
→ レシピ1つですべてを一括切り替え
エンジニアごとに設定方法が異なり、引き継ぎのたびにゼロから始まる。
→ レシピベースの標準化された運用
新製品の追加やトラブル対応が外部エンジニアに依存する。
→ ビジョン・フィーダー・ロボットを1画面で解決
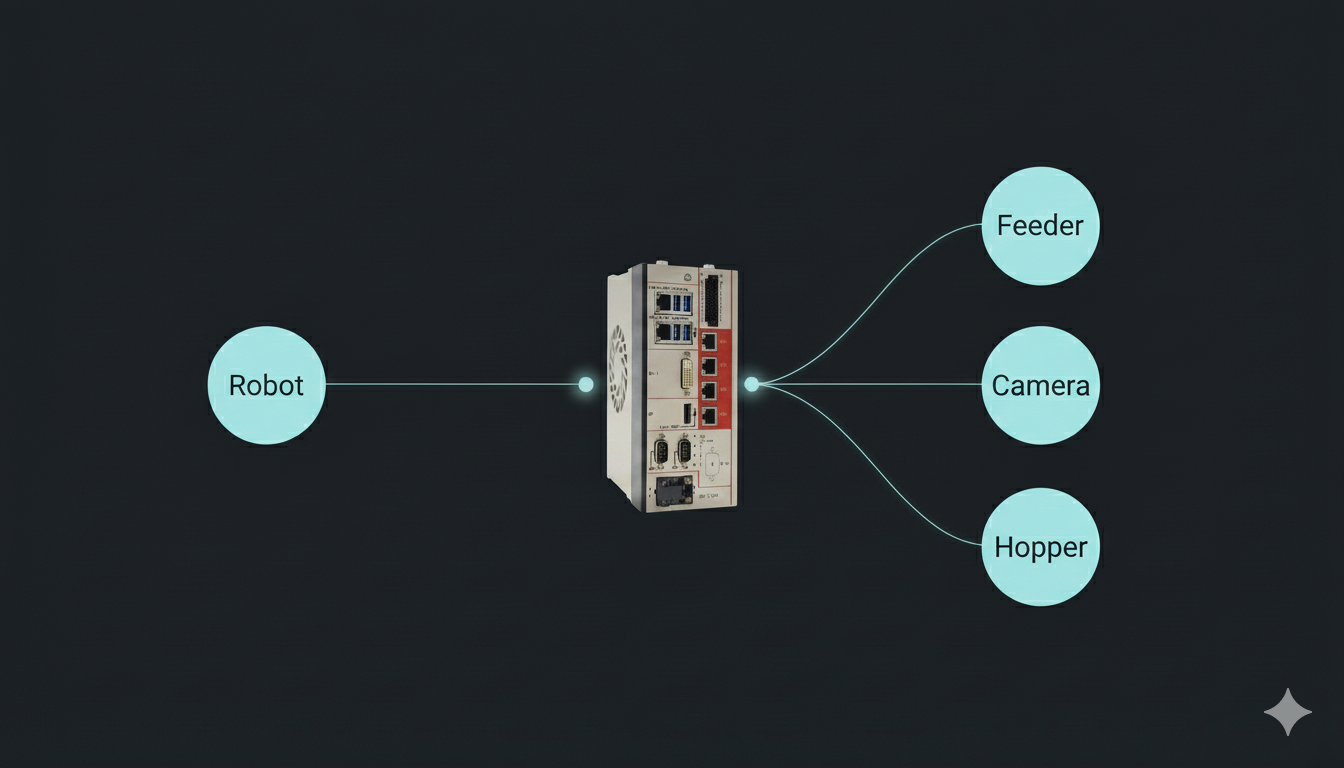
統合コントローラー
カメラ・ロボット・フィーダー・PLC を1つの統合コントローラーへ
 Windows ベース
Windows ベース 統合ソフトウェア
各モジュールは独立して動作しますが、レシピに束ねれば製品の段取り替え時に同時に切り替わります。
Recipe Control
従来は製品ごとのビジョンレシピとロボットレシピを別々に管理する必要がありました。AimFactoryCore はロボット内部変数と製品ごとの条件をまとめて管理するため、現場でロボットプログラムが増え続けることがありません。

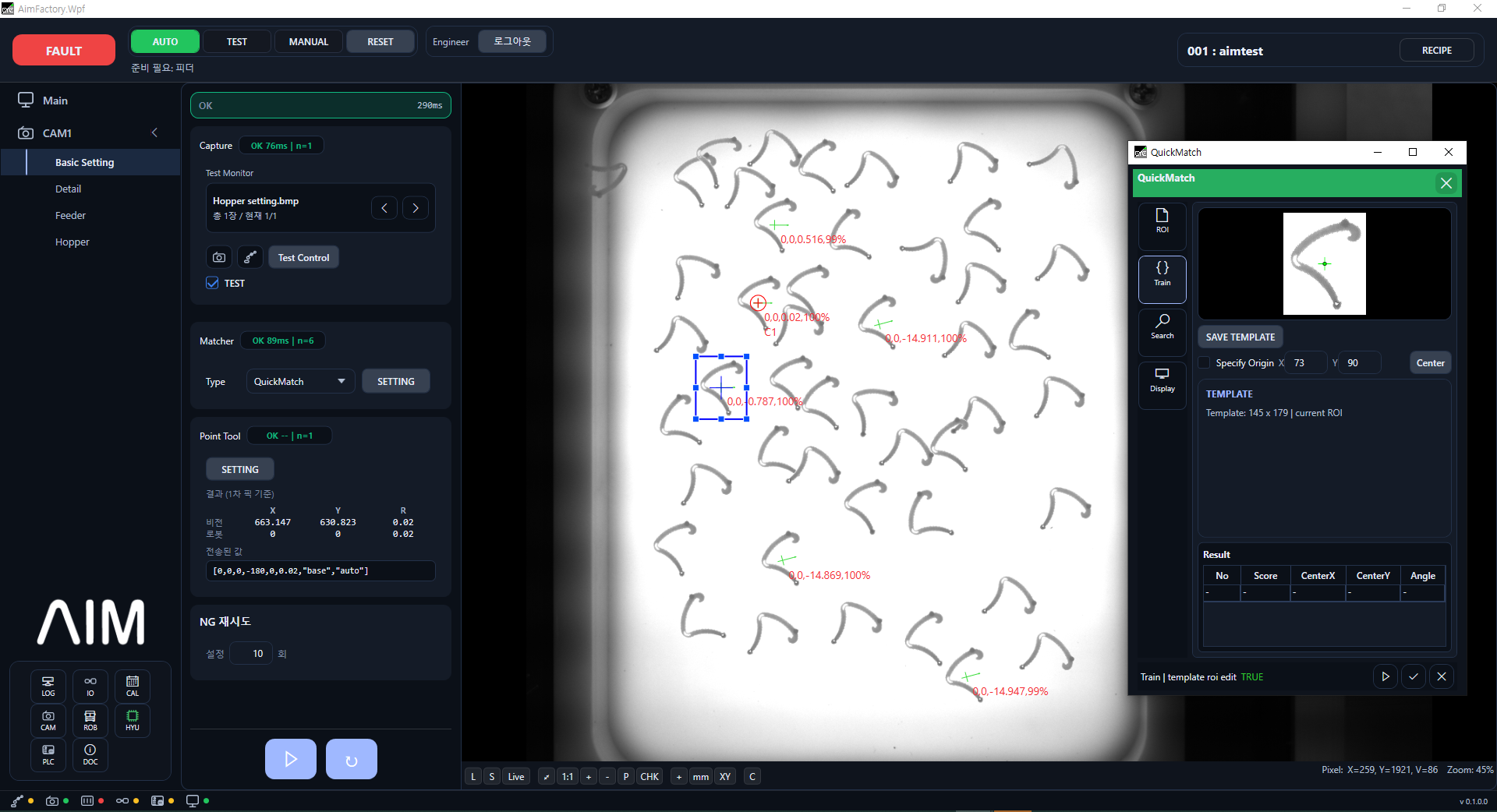
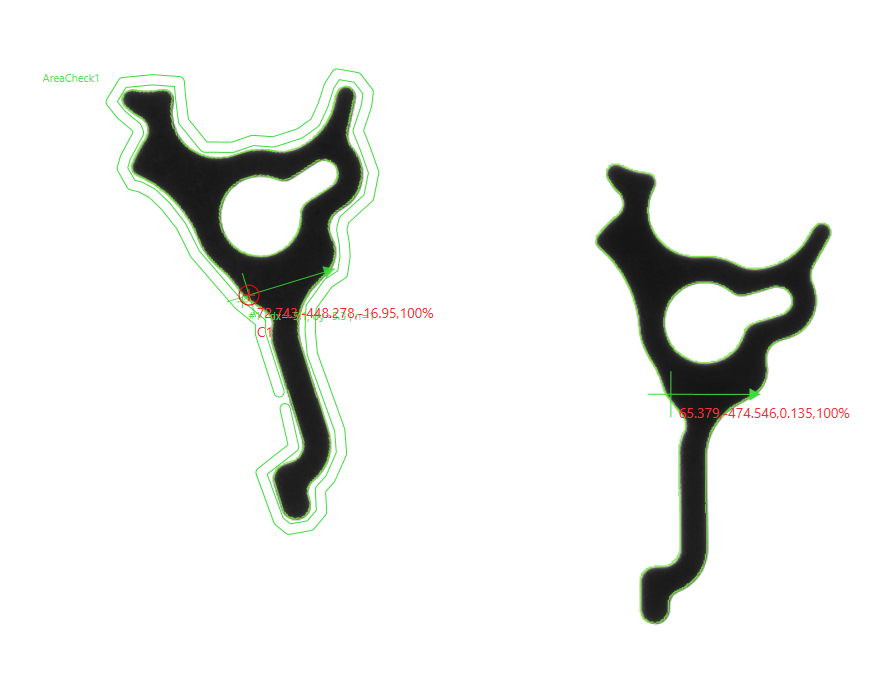
Vision Setting
ビジョンマッチング後、領域ごとの検査を行い、中心補正ロジックで座標を再整理します。丸物部品・重なり・グリッパー干渉を、すべて現場条件に対して確認します。
Monitoring
ロボット・PLC・IO インターフェースの状態を、生産速度やサイクルフローと並べて表示し、設備の現状を素早く判断できます。

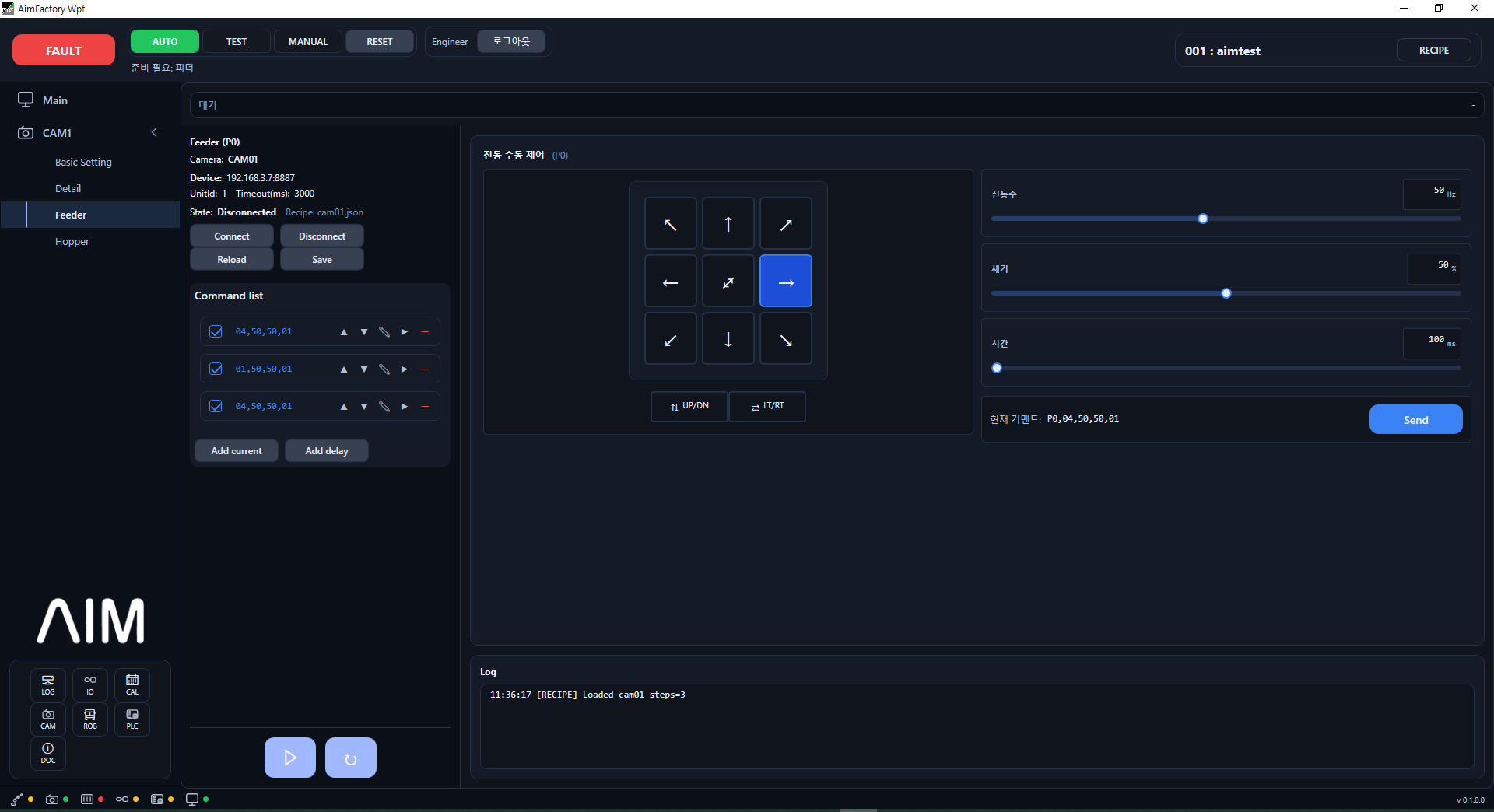
Feeder Control
振動の方向・周波数・強度・時間に加え、バックライト・トップ照明・ホッパー条件を製品レシピの一部として保存・呼び出しします。
Vision Tools
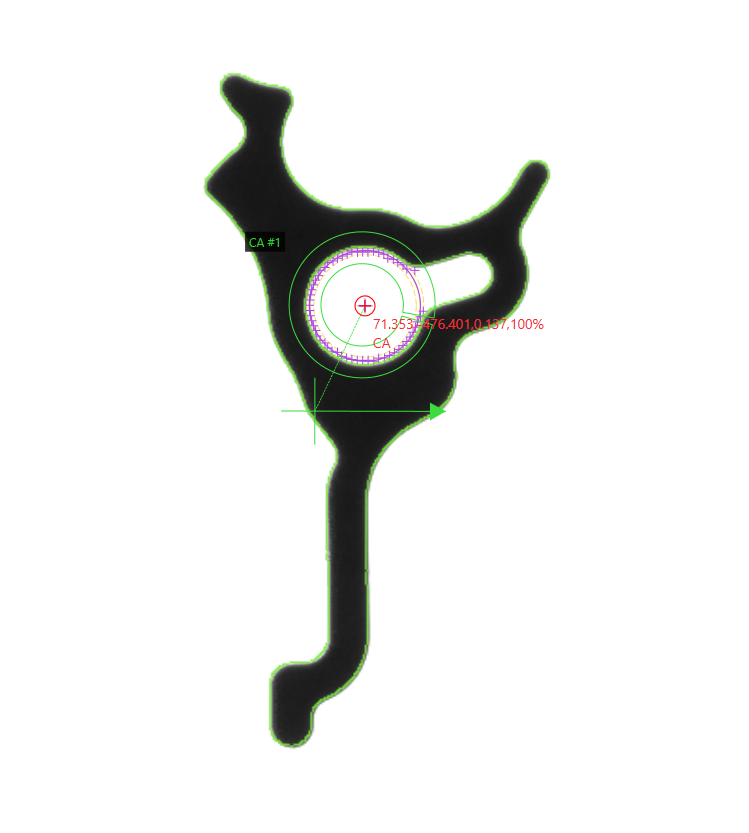
マッチングした部品を領域ごとに再確認します。
丸物部品の中心を補正し、座標精度を高めます。
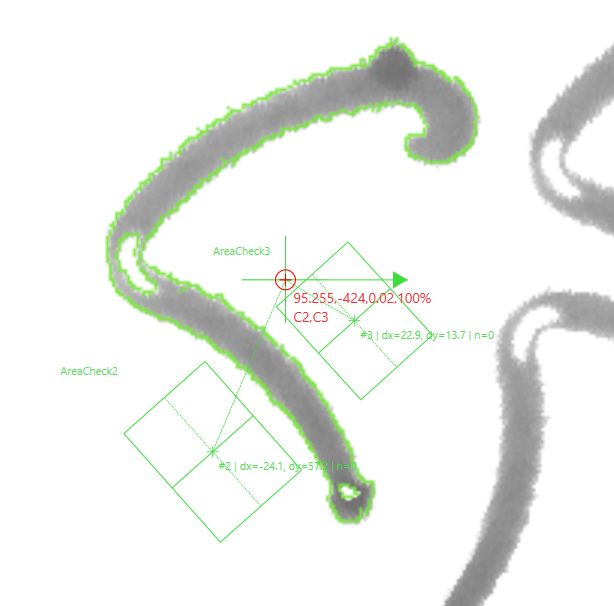
ピックアップ前にグリッパーがアクセス可能な領域を確認します。
重なった部品を除外し、安定したピックアップ条件を確保します。
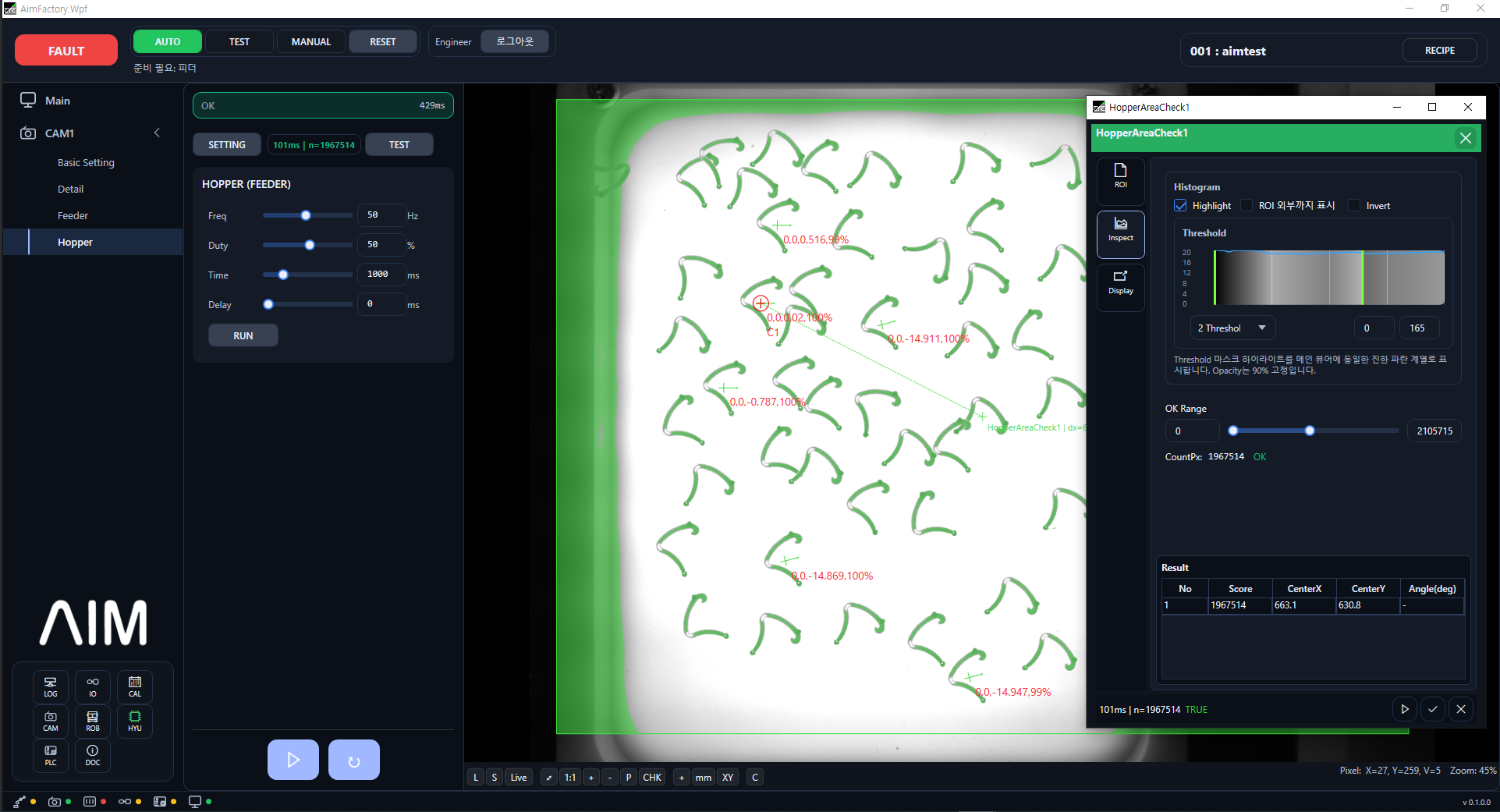
色検出に基づいて供給状態とホッパー条件を調整します。
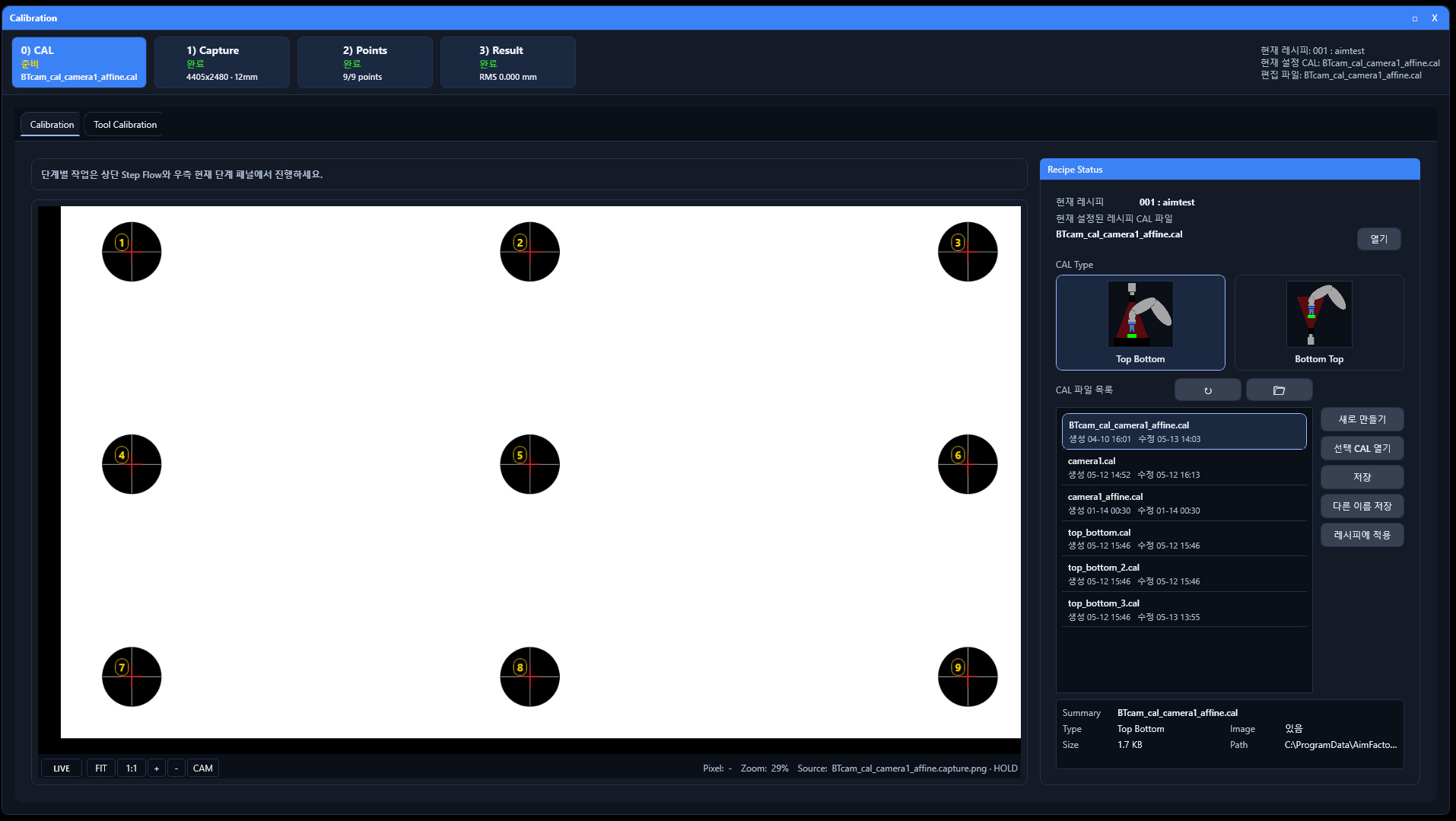
Hardware Integration

既存のカメラ・レンズ・照明・コントローラー構成をそのまま使えます。

振動・照明・ホッパーを AimFactoryCore から直接制御します。
ロボットデータと自動シーケンスを柔軟に接続します。
Robot Integration
現代ロボティクスと IAI は直接運用、その他のブランドは TCP/IP またはベンダープロトコルで統合します。

Hyundai Robotics
AimFactoryCore が直接運用

IAI
AimFactoryCore が直接運用













Applications