
01
ロボットビジョンと検査ビジョンは違う
検査ビジョンは画像を見て 合否(1/0) を出力します。 ロボットビジョンは違います。部品がどこにあり、どの向きかを計算し、ロボットがそのまま使える X / Y / θ 座標 を生成します。
この違いを理解せずに検査ビジョンをロボットに直結すると、ピック座標がなく、ロボットはどこへ行けばよいか分かりません。 撮影距離・視野・出力の形がすべて異なります。
Vision Engine を見る →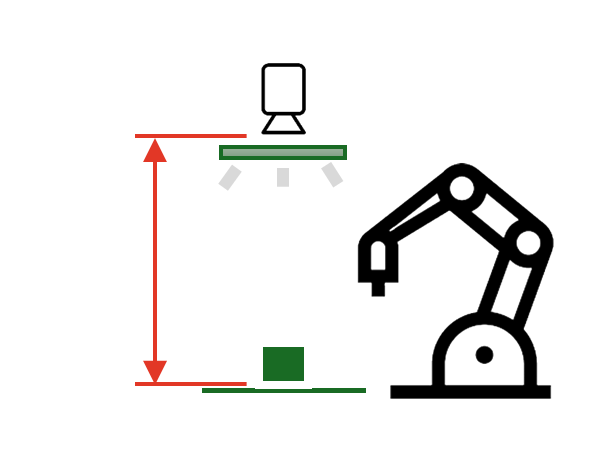
650 mm+
アーム干渉を考慮した撮影距離
200~400×
広範囲で多数の部品を撮影

X / Y / θ
結果は OK/NG ではなくロボット座標
02
キャリブレーション — カメラとロボットの座標を整合
カメラが見る座標と、ロボットが動く座標は、最初は異なります。 キャリブレーションは、この2つの座標系を整合させるプロセスです。 9点の基準で実際のロボット位置を画像座標に対応づけると、以降ビジョンが認識するすべての位置が、ロボットがそのまま使える mm 単位の座標に変換されます。
キャリブレーションが正確でなければ、認識率がどれだけ高くてもピックは外れます。 AIM はキャリブレーションシートの認識からロボット座標入力、ツール誤差の自動計算まで、AimFactoryCore 内で処理します。
AimFactoryCore を見る →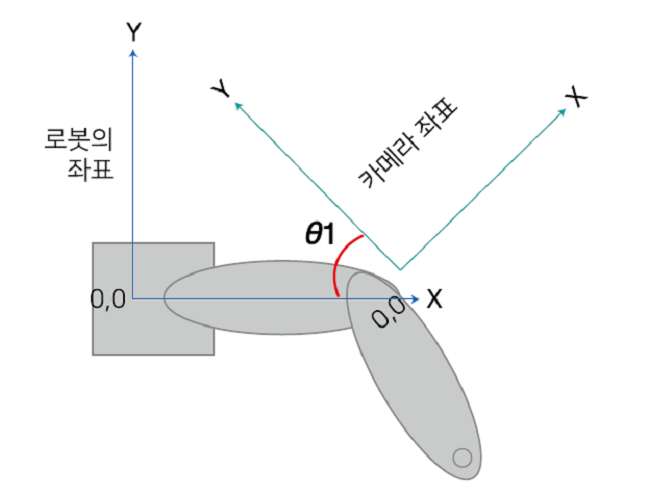
03
座標転送 — TCP/IP と IO
ビジョンが計算したピック座標をロボットコントローラーに渡す方法は、大きく2つあります。 X/Y/θ 座標文字列を TCP/IP ソケット通信 で直接送る方法と、 デジタル IO 信号 でトリガー / 完了 / インターロックをやり取りする方法です。
ABB・UR・現代など 22以上のブランドが標準 TCP/IP 通信に対応しています。 AimFactoryCore は、撮影要求 → ビジョン処理 → 座標転送 → ピック確認を1つの運用フローにまとめます。
ロボット連携を見る →TCP/IP communication flow
トリガー送信
ロボット → ビジョン PC:撮影/認識の要求
応答待ち
ビジョン PC が CSV 文字列を送るまで待機
受信データを解析
OK/NG
結果
X
位置
Y
位置
RZ
角度
n
個数
ロボット移動条件を確認
04
座標転送 — ベンダー固有プロトコル
一部のロボットは TCP/IP 標準ではなくメーカー固有のプロトコルを使用します。 FANUC は PCDK、YASKAWA は Motocom/MotoPlus で通信します。 この場合、標準ソケットではなく、その SDK や専用インターフェースを通じて座標を渡す必要があります。
AIM はこれらのベンダープロトコルを専用対応で統合できます。 通信設定はロボットブランドやコントローラー機種によって異なるため、導入前にお客様のロボット/コントローラー情報を確認します。
ロボット連携を見る →


AGILEBOT
05
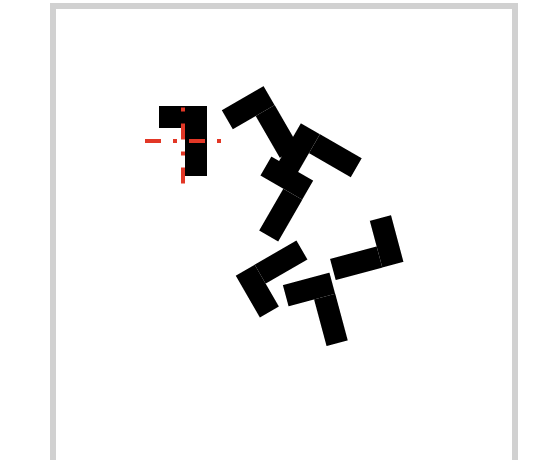
テンプレートマッチングと認識性能
RoboEYE は基準画像(テンプレート)と撮影画像を比較し、部品の位置と回転角を検出します。 照明・露出・ROI の条件が良ければ、処理時間は数十ミリ秒程度に収まり、認識は 99% 以上で安定します。
逆に、照明が変動したり表面反射が強いと、認識率は急激に低下します。 テンプレートマッチングの性能は、アルゴリズムより先に 照明・レンズ・撮影環境 から生まれます。 AIM は部品ごとの照明・露出条件をレシピとして保存し、モデルが変わっても認識を維持します。
AimFactoryCore を見る →
① マッチング設定
基準画像(テンプレート)を登録し、ROI・照明・露出条件をレシピとして保存します。
② 認識結果
部品の位置と回転をリアルタイムで検出し、座標をロボットに渡します。
06
ロボットビジョンに必要な検査
ピック自動化では、ビジョンは「位置を見つける」だけではありません。部品が正しく把持されたか、向きは正しいか、次工程に渡してよいかも検査します。
前後・向きの判別
ピック前に部品の表裏と向きを確認し、反転や向き違いを除外して、正しい向きの部品だけを次に進めます。
重なり検査
重なっている部品をピックできるか判定します。重なった部品をピックすると2つ同時に持ち上げたり把持失敗が起きるため、きれいに分離した部品だけを選びます。
グリッパー検査
ピック後、部品が正しく把持されているかをビジョンで確認し、把持失敗やズレを次工程の前に検出します。