ROBOT SUITE
Agilibot × AimFactoryCore
統合運用
TCP/IP で Agilibot コントローラーに直接接続 — ロボット状態の監視、 座標の読み書き、アラーム受信、JOB 制御を1つのビジョン画面で。
HOW IT CONNECTS
コントローラーへの直接接続
Agilibot コントローラーは TCP/IP ソケット通信に対応しています。 AimFactoryCore は Ethernet 経由で直接接続し — ドライバー不要 — ロボット状態・座標・アラームをリアルタイムで受信します。
ビジョン PC
AimFactoryCore
TCP/IP
Ethernet 直接
Agilibot コントローラー
192.168.x.x
ロボット動作
座標 · JOB
通信
TCP/IP ソケット — Ethernet 直接接続
更新レート
1 秒 — 状態・座標をリアルタイム受信
座標形式
TCP mm/deg — X/Y/Z/Rx/Ry/Rz
FEATURES
Agilibot でできること
ロボット状態のリアルタイム監視
接続状態・Motor / E-STOP / 速度 / IDLE・Main JOB の読み込み状態を1秒ごとに更新し、ビジョン画面で直接確認できます。
座標の読み書き
TCP ワールド座標(X/Y/Z/Rx/Ry/Rz)をビジョンソフトから直接読み書き。ビジョン結果をロボットがすぐ使える形式で送信します。
コントローラーアラームの受信・記録
アラームコードとタイムスタンプを自動収集。現場エンジニアがビジョン画面から直接原因を特定し対応できます。
JOB 読み込み・実行制御
AimFactoryCore のファイルを Agilibot コントローラーに読み込んで実行。ティーチペンダント不要の PC ベース運用。
レシピ単位の変数管理
多品種ラインで機種ごとに異なるロボット変数をビジョンレシピで管理。レシピを切り替えるだけでロボット変数が自動更新されます。
TCP/IP 直接接続
Ethernet 経由で Agilibot コントローラーに直接接続。追加ドライバーやミドルウェアは不要で、IP アドレスのみで接続できます。
ACTUAL SCREENS
実際の運用画面
Agilibot を AimFactoryCore に接続した実画面です。
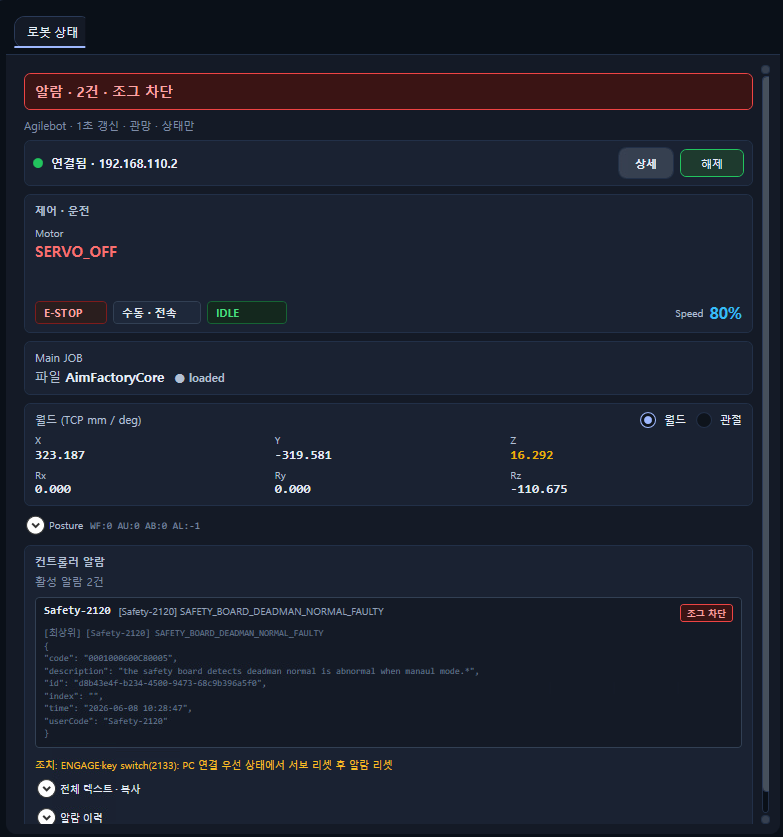
ロボット状態
接続状態・Motor ON/OFF・E-STOP・速度・Main JOB・コントローラーアラームをすべて1画面で。

リアルタイム座標
TCP ワールド座標(X/Y/Z/Rx/Ry/Rz)とジョイント座標をリアルタイムで監視。
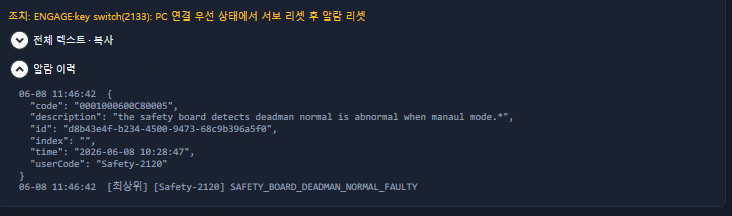
アラーム履歴
コントローラーのアラームコード・メッセージ・タイムスタンプを記録。原因究明と対応が速い。
BEFORE / AFTER
Agilibot 運用 — 導入前と導入後
ロボット状態の確認
ペンダントまで歩いて確認。ビジョン画面とロボット画面を切り替えて原因を探す。
ロボット状態・アラーム・座標がビジョン画面で一目で見える。対応が速い。
座標の送信
ビジョン結果をメモするか別プログラムで変換し、手動で入力。
ビジョン結果が Agilibot 形式に自動変換されて送信。人手の介在なし。
製品機種の切り替え
機種ごとにロボット変数を手動で変更。専門家が必要。
レシピを1つ選ぶだけでロボット変数が自動切り替え。
VIDEO
Agilibot の動作

Agilibot ロボット動作動画
GET STARTED
Agilibot 統合のお問い合わせ
Agilibot の機種とコントローラーのバージョンをお知らせください。統合が可能かを検討します。