Research Note 08
ABB 로봇 연동 — AimFactoryCore Plug-in
ABB IRC5 컨트롤러와 AimFactoryCore 간 TCP/IP 통신 구조를 검증했습니다.
- ABB IRC5
- RAPID 통신
- TCP/IP 소켓
- Quaternion 변환
- AimFactoryCore Plug-in
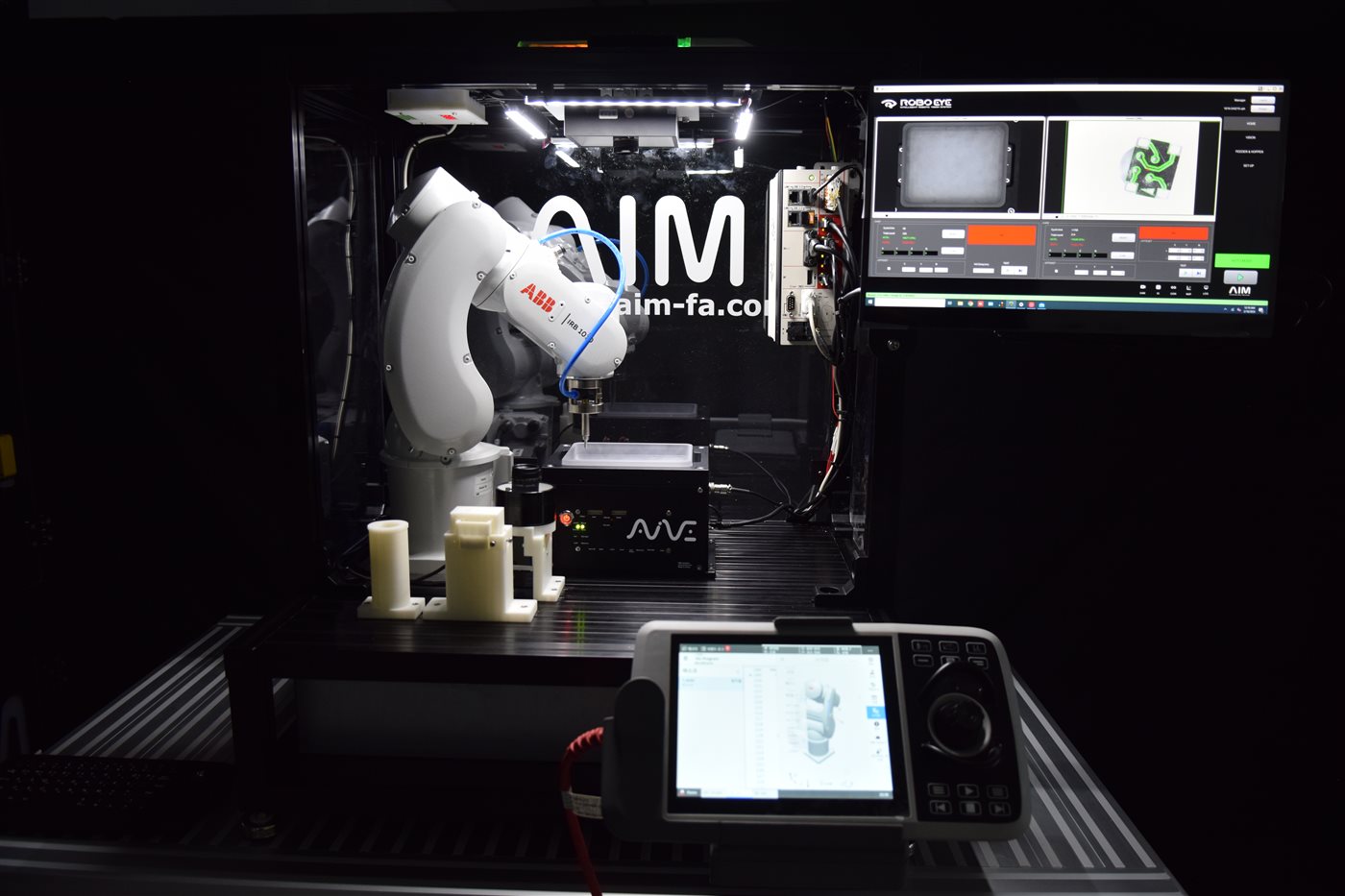
ABB 로봇은 IRC5 컨트롤러를 통해 소켓 통신으로 비전 좌표를 수신합니다. AimFactoryCore Plug-in은 RAPID 언어 기반의 통신 시퀀스를 처리하며, 카메라 트리거·좌표 전달·모델 전환을 단일 인터페이스로 제어합니다.
ABB 특유의 쿼터니언(Quaternion) 자세 표현을 AimFactoryCore 내부 좌표계로 변환하는 루틴을 개발했습니다. 이 구조가 현재 AimFactoryCore의 ABB 직접 연동 기반입니다.
이 기술이 지금의 제품에 들어 있습니다
연구 노트에서 검증한 구조가 AimFactoryCore와 Robot Suite로 이어졌습니다.