Research Note 04
Universal Robots 연동 — URCaps Plug-in
PolyScope URCaps로 AIVE 최대 4대를 동시에 연결하고, 비전 높이 보정까지 UI 안에서 처리합니다.
- Universal Robots
- URCaps
- PolyScope
- 최대 4대 동시 연결
- HomeOffset 높이 보정
- AIVE 기본 프로토콜
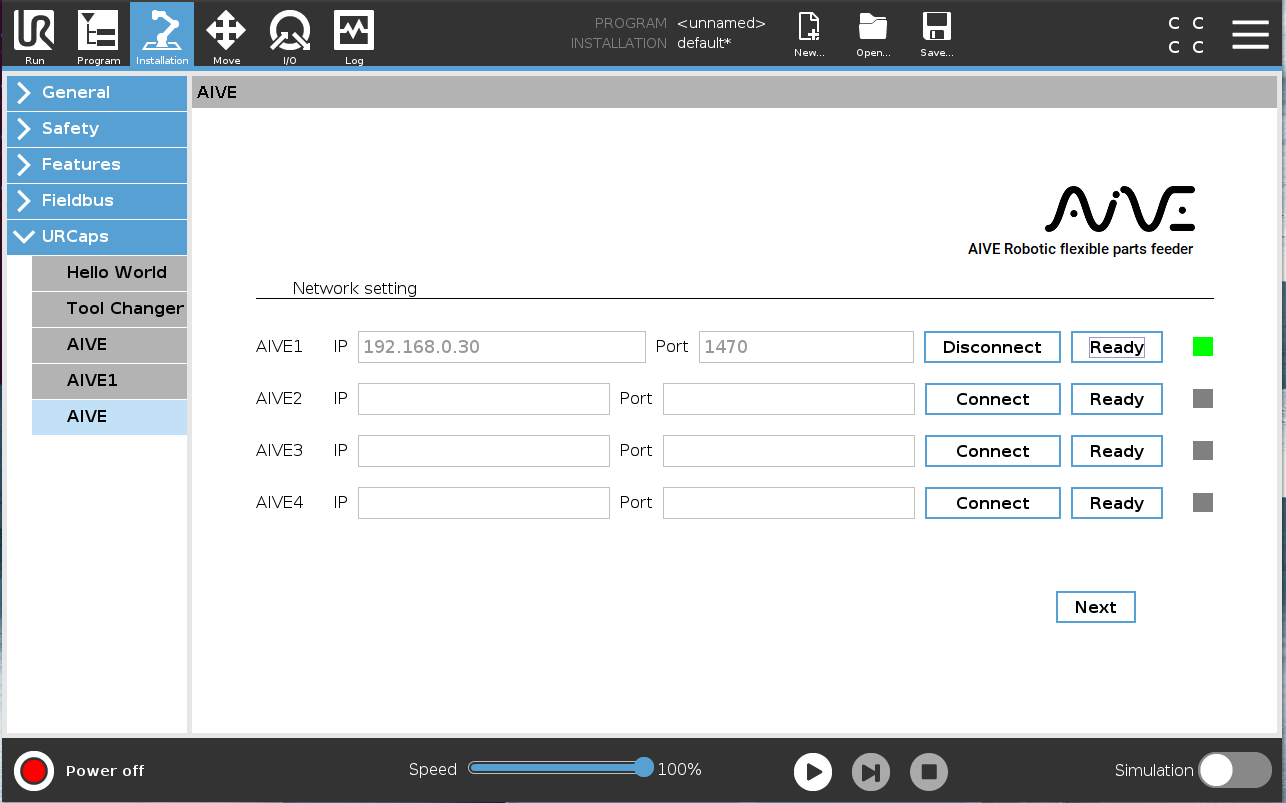
URCaps 플러그인으로 설치하면 PolyScope의 Installation 탭에 AIVE 메뉴가 생깁니다. AIVE1~4까지 최대 4대를 IP·Port(1470)로 동시 연결하고, Ready 버튼으로 모터 ON + 홈을 잡습니다. 연결 상태는 Green(정상) / Red(Error) / Gray(연결 끊김)으로 표시됩니다.
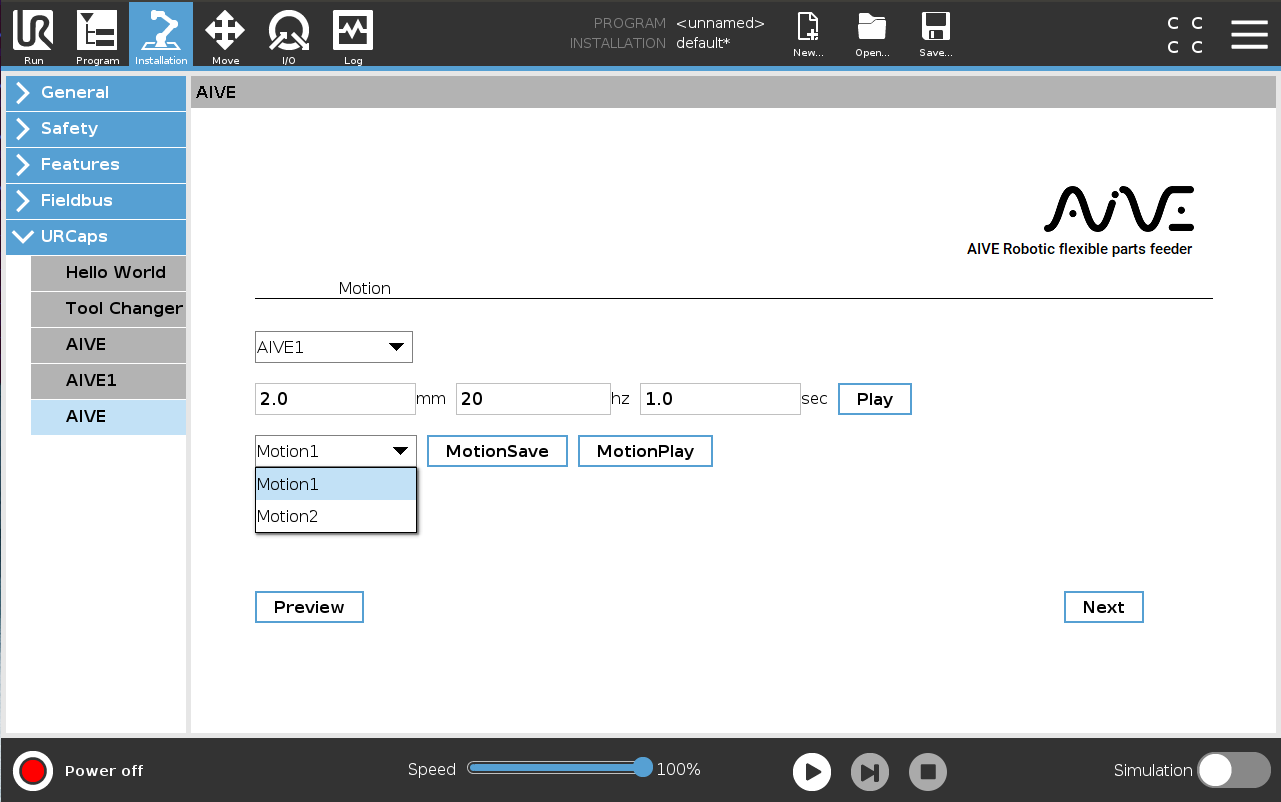
설치 흐름은 3단계입니다. Network Setting에서 AIVE를 연결한 뒤, Motion Setting에서 mm·hz·sec 파라미터를 입력하고 Play → MotionSave로 Motion 1/2에 저장합니다. 마지막 Vision Calibration 탭에서는 부품 높이만큼 Home Offset 값을 입력해 AIVE 바스켓 높이를 보정합니다(예: 부품 7mm → -7 입력으로 바스켓 7mm 상승).
Program 탭 명령: Connect/Disconnect, Home, Light On/Off, Motion #1/2, Manual(mm·hz·sec), HomeOffset. 'Wait for AIVE Complete'를 체크하면 동작 완료 신호를 받은 뒤 다음 스텝으로 넘어가고, 미체크 시 즉시 다음 명령을 실행합니다. 동일 AIVE에 연속 모션 명령을 보낼 때는 체크가 필수입니다.
UR의 URCaps 방식은 KUKA(XML 파일 설치)나 Stäubli(IO 메뉴 등록)와 달리 UI에서 모든 설정이 가능합니다. 로봇 엔지니어가 파일을 직접 수정하지 않아도 되는 구조라 현장 대응 속도가 높습니다.
이 기술이 지금의 제품에 들어 있습니다
연구 노트에서 검증한 구조가 AimFactoryCore와 Robot Suite로 이어졌습니다.