1. 핵심 요약
일반 산업용 비전
주로 제품을 검사하고 판정합니다. 결과는 OK/NG, 유무, 치수, 불량 여부 등 검사·측정 값 중심입니다.
로봇 비전
부품을 찾는 것에서 끝나지 않습니다. 인식 위치를 로봇 좌표로 변환하고 로봇/PLC와 연결해 Pick & Place까지 이어져야 합니다.
로봇 비전에 필요한 운영 흐름
- 비전 인식
- 좌표 정합
- 로봇/PLC 연결
- Pick & Place
- Pick 검증 / 모델 변경 / 운영 Workflow
Technology Note
검사하는 비전과, 로봇을 움직이게 만드는 비전은 목적과 구조가 다릅니다.
일반 산업용 비전은 제품을 검사·판정하는 데 집중합니다. 로봇 비전은 인식한 위치를 로봇 좌표로 바꾸고 로봇/PLC와 연결해 실제 Pick & Place까지 이어야 합니다. AIM은 이 과정을 생산 운영 기준의 흐름으로 구성하는 것을 목표로 합니다.

주로 제품을 검사하고 판정합니다. 결과는 OK/NG, 유무, 치수, 불량 여부 등 검사·측정 값 중심입니다.
부품을 찾는 것에서 끝나지 않습니다. 인식 위치를 로봇 좌표로 변환하고 로봇/PLC와 연결해 Pick & Place까지 이어져야 합니다.
로봇 비전에 필요한 운영 흐름
일반 산업용 비전
제품을 보고 검사·판정하는 시스템입니다.
로봇 비전
제품을 보고 위치를 계산하고, 로봇이 움직일 수 있도록 연결하는 시스템입니다.
AIM Robot Vision Automation
비전 인식, 좌표 정합, 로봇/PLC 연결, Pick 검증, Recipe 운영, 필요 시 Flexible Feeding까지 하나의 운영 흐름으로 구성하는 자동화 방식입니다.
| 구분 | 일반 산업용 비전 | 로봇 비전 |
|---|---|---|
| 주요 목적 | 검사, 판정, 측정 | 로봇 동작을 위한 위치 인식과 좌표 전달 |
| 결과값 | OK/NG, 유무, 치수, 불량 여부 | X/Y/θ 좌표, Pick 위치, 로봇 이동 정보 |
| 좌표계 | 이미지 좌표 중심 | 이미지 좌표 ↔ 로봇 좌표 변환 필요 |
| 통신 | PLC에 검사 결과 전달 중심 | 로봇/PLC/비전 간 순서와 신호 흐름 필요 |
| 운영 포인트 | 검사 조건 설정 | Pick 흐름, 좌표 보정, 모델 변경, 유지보수 |
| 실패 시 영향 | 오검출, 오판정 | Pick 실패, 위치 오차, 라인 정지 가능 |
| 필요한 경험 | 비전 검사 경험 | 비전 + 로봇 + PLC + 현장 Workflow 경험 |
일반 산업용 비전은 제품의 유무, 불량, 치수, 방향 등을 판단하는 데 집중합니다. 로봇 비전은 그 결과를 로봇 동작으로 연결해야 합니다. 비전이 부품을 정확히 찾았더라도 이미지 좌표와 로봇 좌표가 맞지 않으면 로봇은 잘못된 위치로 이동할 수 있습니다.
그래서 로봇 비전에서는 좌표 정합(Calibration) 이 중요합니다. 또한 로봇 촬영 요청 → 비전 인식 → 좌표 계산 → Pick → 결과 확인 순서가 맞아야 하므로 통신·순서·운영 Workflow가 단순 검사보다 더 중요합니다.

Pick Cycle 순서
Pick & Place에서는 2D 카메라가 물체 위치를 찾고 좌표를 로봇 컨트롤러에 전달해 집어 옮깁니다. 물체가 분리되어 한 평면에 놓인 단순·고속 작업에 적합한 접근입니다. AIM은 이를 생산 환경에 맞게 확장합니다.
2D Vision
+ 좌표 정합
+ Robot / PLC 연결
+ 필요 시 Flexible Feeding
+ Recipe 기반 운영
모든 문제를 복잡한 3D 시스템으로만 해결하려 하지 않고, 2D Vision과 Feeding, Calibration, 운영 Workflow를 조합해 유지 가능한 자동화를 구성하는 방향을 지향합니다.
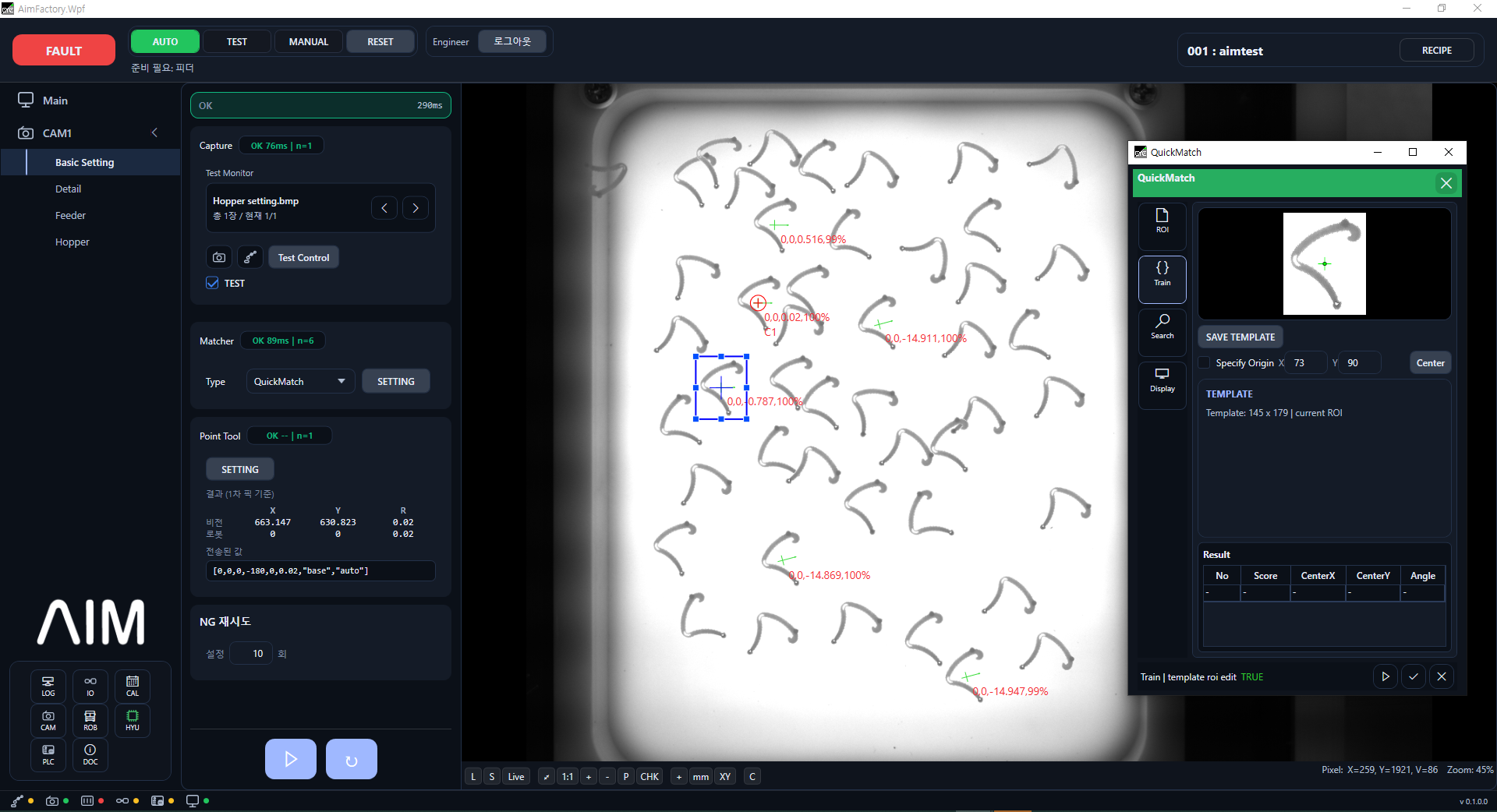
로봇 비전이 단순한 검사가 아니라 어떻게 "로봇이 움직일 수 있는 정보"를 만드는지 — AIM의 비전 소프트웨어가 한 사이클 안에서 처리하는 6가지 기능입니다.
이미지에서 부품의 위치를 검출하고, Pick 가능한 후보 위치를 찾습니다.
부품의 방향과 회전각을 계산하여 로봇이 어떤 자세로 접근해야 하는지 결정합니다.
모든 인식 결과가 바로 Pick 가능한 것은 아닙니다. 위치, 간섭, Score 조건을 기준으로 Pick 가능한 후보를 선택합니다.
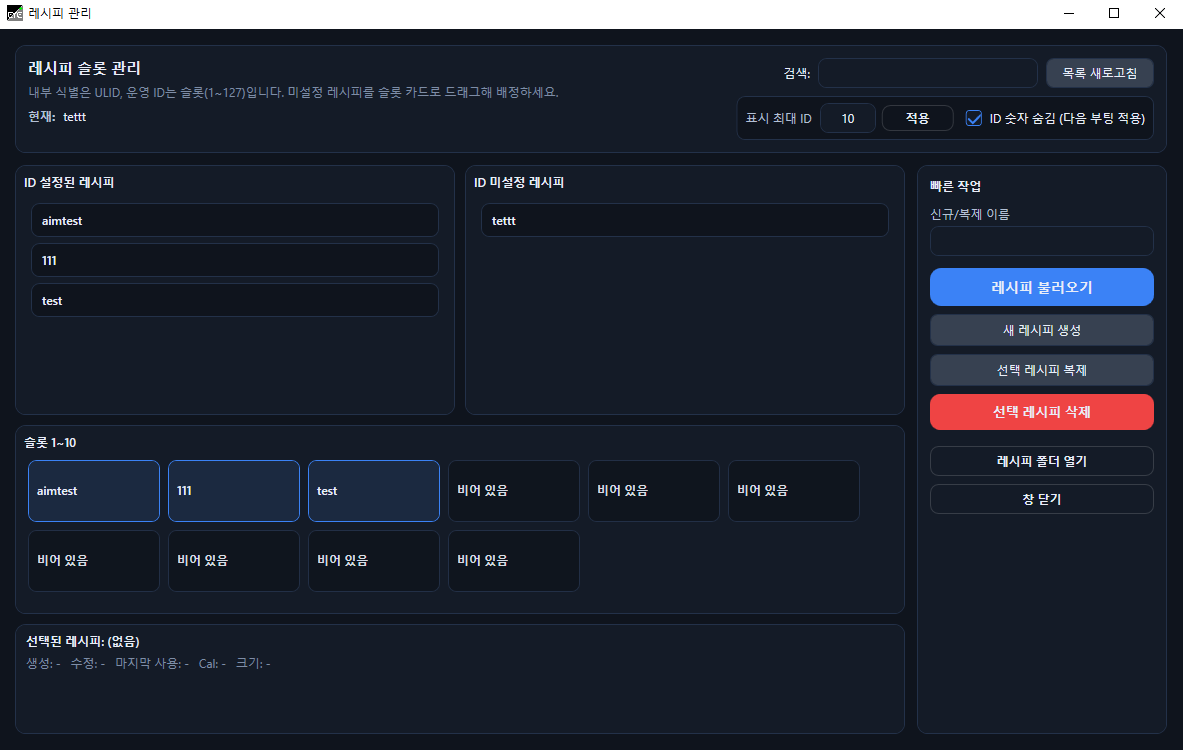
제품별 비전 조건을 Recipe로 저장해 모델 변경 시 안정적으로 조건을 불러올 수 있습니다.
카메라가 인식한 이미지 좌표를 로봇이 사용할 수 있는 실제 좌표로 변환합니다.
Pick 동작 전후의 상태를 확인해 자동화 흐름의 안정성을 높입니다.
검사 비전이 1~3단계에서 끝난다면, 로봇 비전은 8단계 전체가 필요합니다. 각 단계가 빠지면 로봇은 좌표가 없거나, 잘못된 좌표로 움직입니다.
정밀 비전, 진동 패턴, Recipe 관리의 조합으로 — 초소형 SMD부터 박판·고무, 투명·반사 부품까지 다룹니다.
초소형 SMD, 칩 부품. 듀얼 카메라 검사·픽업으로 안정.
박판·고무·스프링 같은 난공급 부품. 진동 패턴과 비전 정합으로 Pick.
원형·복잡 형상은 회전형 피더(FlexiBowl)와 비전 조합으로 분산·Pick.
조명·노출·ROI를 Recipe로 관리해 환경 변화에도 안정적인 인식.
현장에서 자주 보는 잘못된 매칭과 그 구조적 원인입니다. 처음부터 로봇 비전으로 설계하면 이런 문제를 피할 수 있습니다.
상황
결과 — OK/NG 결과만 나오고 Pick 좌표가 없어, 로봇이 어디로 가야 할지 모릅니다.
상황
결과 — 로봇 좌표계와 어긋나 매번 보정이 필요하거나 충돌 위험이 생깁니다.
상황
결과 — 모델이 바뀔 때마다 조건을 수동 입력해야 해 운영이 어려워집니다.
상황
결과 — 비전·로봇·피더가 따로 움직여 트리거·동기화 문제가 반복됩니다.
단순히 카메라로 부품을 찾는 수준이 아니라, 아래 요소를 하나의 운영 흐름으로 맞춥니다.
이 흐름이 맞춰져야 실제 생산 환경에서 안정적인 Pick & Place 자동화가 가능합니다.
이 페이지는 외부 사진보다 AIM 다이어그램·제품 화면을 우선 사용합니다. 보조 사진은 라이선스·출처가 명확한 자료만 사용하며 아래에 표기합니다.
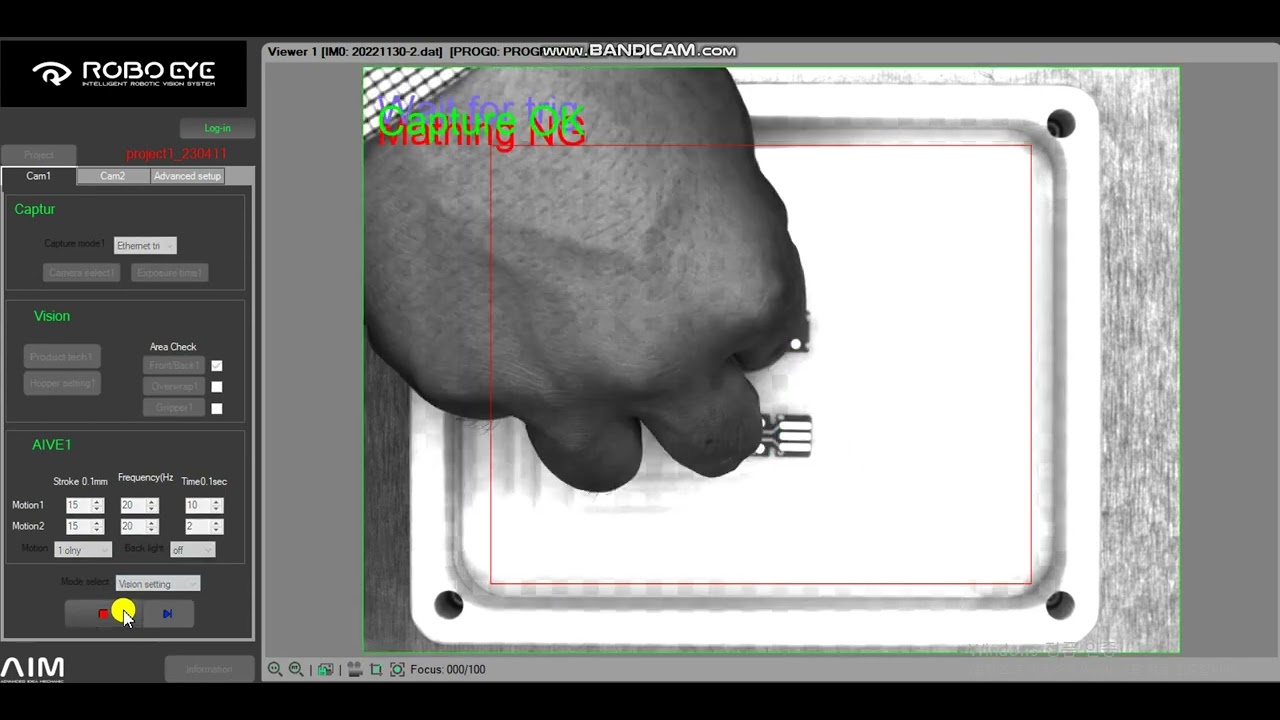
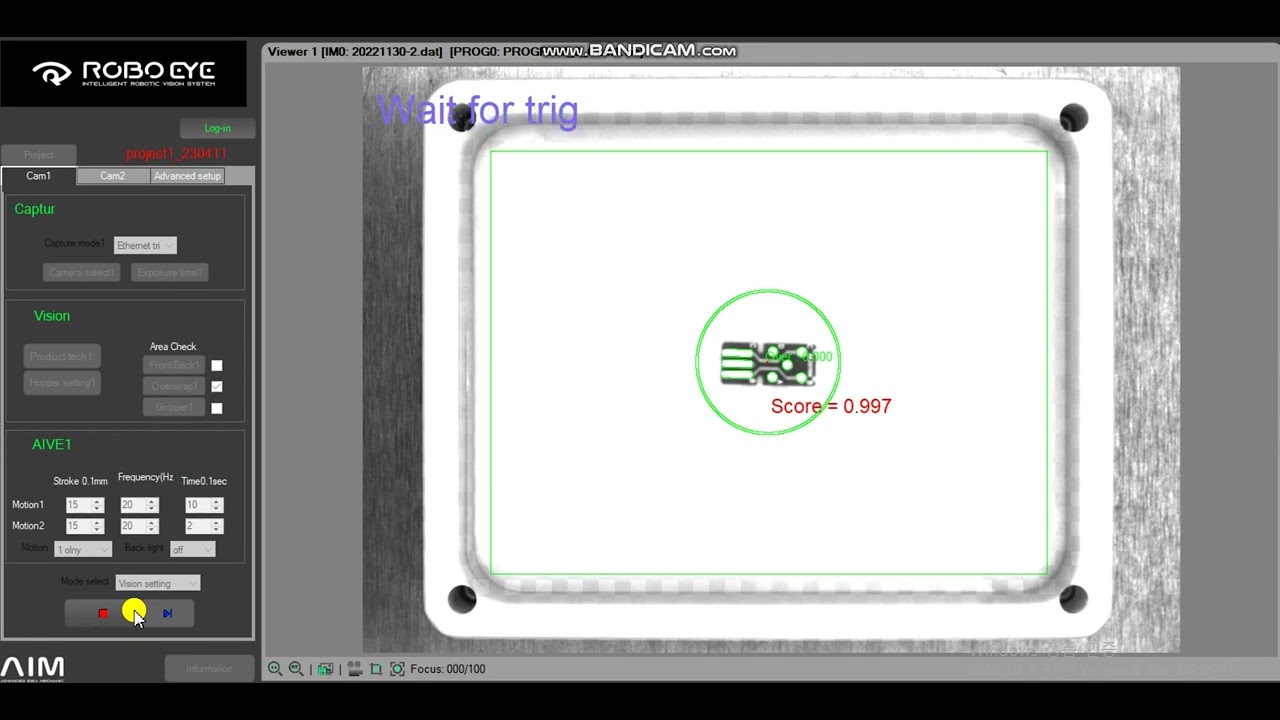
실제 AIMFactoryCore 비전 운영 — 제품 방향·겹침을 자동 판별하는 동작을 영상으로 확인하세요.
제품 앞뒤 검사
앞뒤 방향 자동 판별 — 비전 인식 동작
제품 겹침 검사
겹친 부품 감지 및 재피딩 제어