기술
좌표 정합과 위치 보정 흐름
비전이 인식한 이미지 좌표를 로봇이 실제로 움직일 수 있는 좌표로 변환하고, 생산 환경에서 반복 가능한 픽 위치를 만듭니다.
이미지 좌표
카메라가 인식한 부품 위치와 자세를 기준 데이터로 사용합니다.
로봇 좌표
좌표 변환과 보정값을 통해 로봇 이동 좌표로 연결합니다.
반복 정밀도
모델 변경과 반복 생산에서도 정합 상태를 유지할 수 있도록 운영합니다.
실제 캘리브레이션 설정 영상
로봇과 비전 시스템의 좌표 정합 설정부터 툴 캘리브레이션까지 실제 과정을 영상으로 확인하세요.
로봇과 Calibration 설정
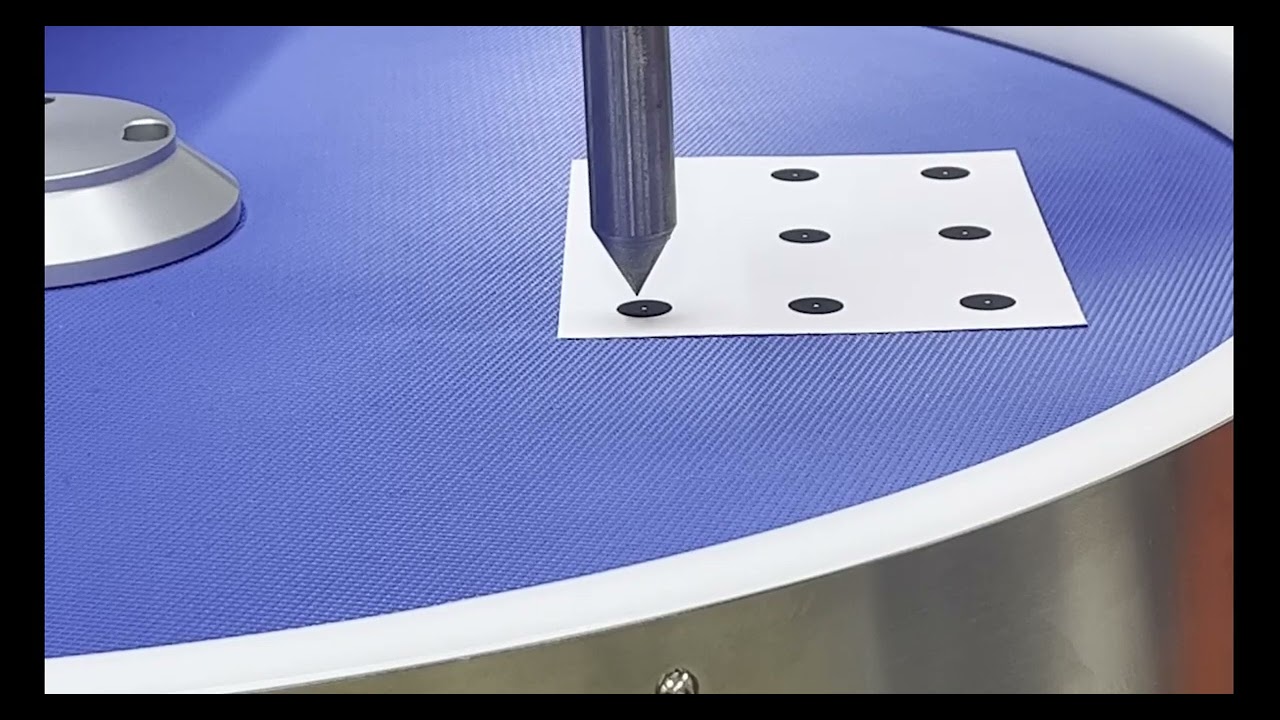
로봇·비전 XY 좌표 매칭 — 9포인트 기준 좌표 정합 설정 방법
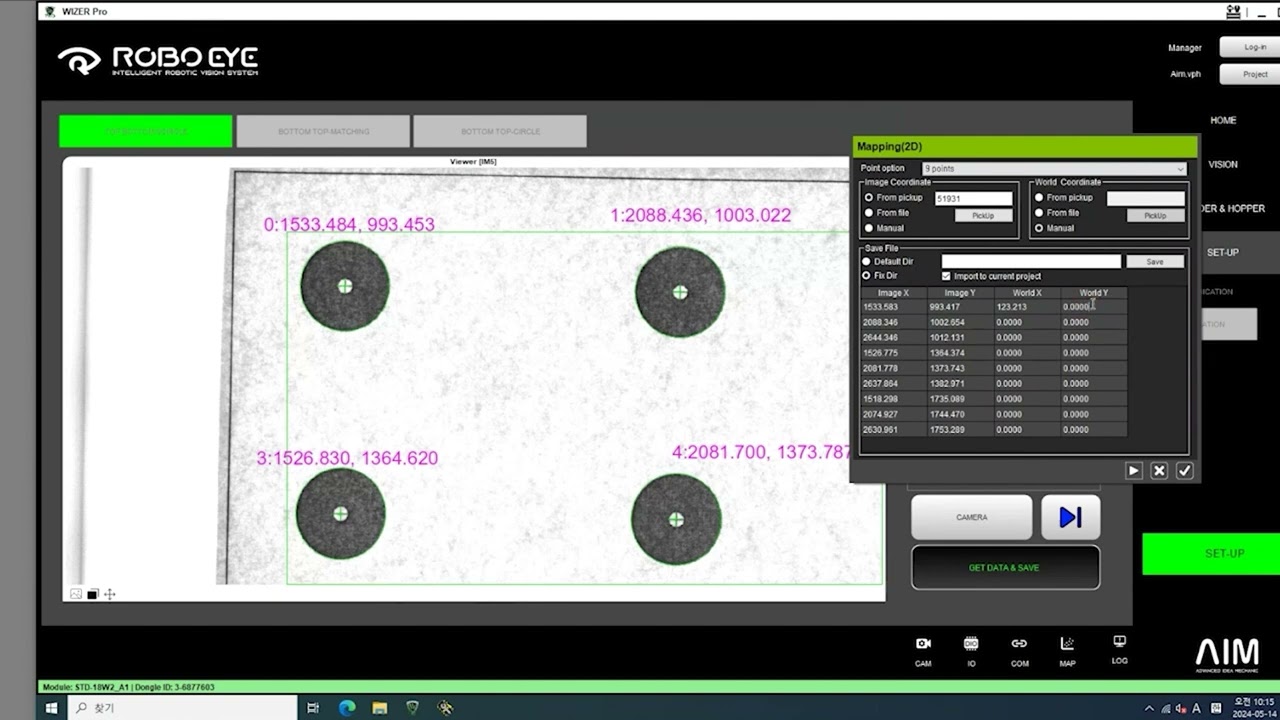
비전 캘리브레이션 — 최신 방식
ROI·Highlight 기반 캘리브레이션 시트 인식 및 로봇 좌표 입력 흐름
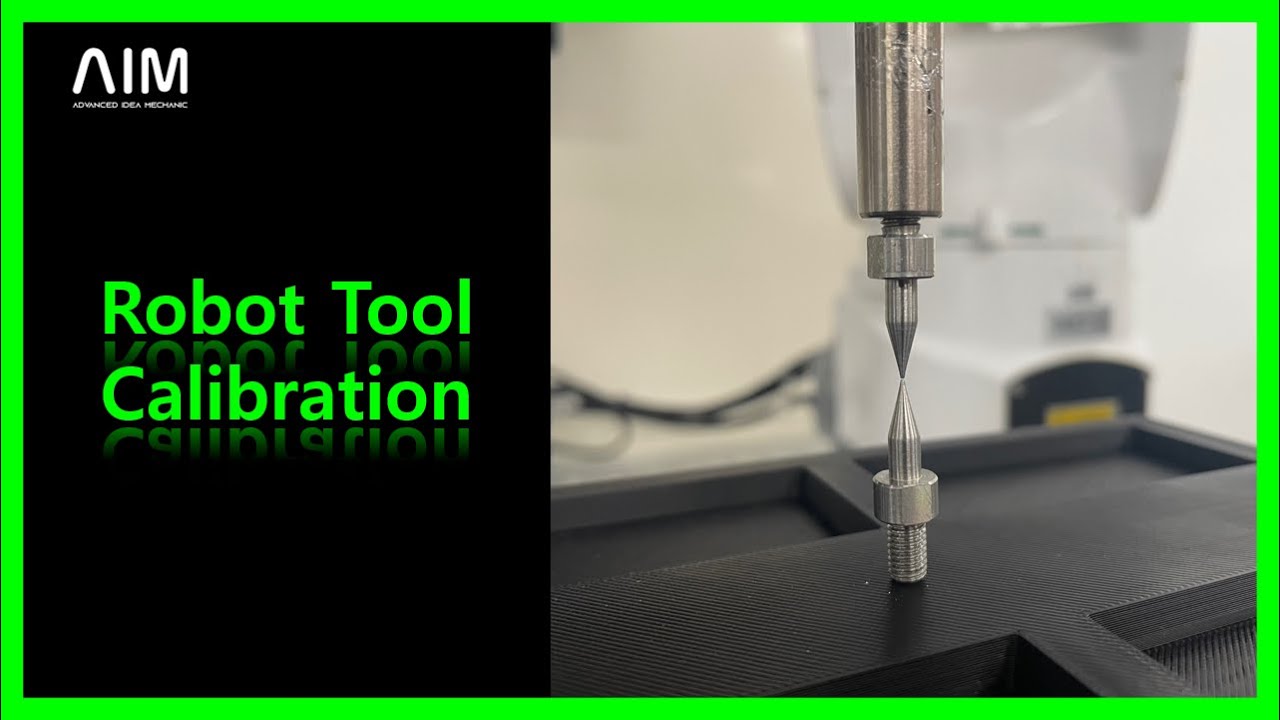
로봇 툴 캘리브레이션
0°·90°·180°·270° 4포인트로 툴 오차 자동 계산 — 현대로봇 실제 데모