기술
RoboInterface — 로봇 / PLC / 비전 통신 인터페이스
로봇, PLC, 비전 장비가 각각 따로 동작하지 않고, 실제 Pick & Place 운영 흐름으로 연결되도록 통신과 신호 순서를 구성합니다.
연결 대상
Robot
Pick 위치, 동작 시퀀스, 촬영 트리거 등 로봇 제어기와의 통신 연결
PLC
라인 신호, 인터록, 공정 상태와 연동하는 PLC 통신
Vision
비전 인식 결과와 좌표 데이터를 운영 흐름으로 전달
페이지 구성 (예정)
RoboInterface의 역할
비전이 계산한 Pick 좌표를 로봇·PLC가 사용할 수 있는 신호와 순서로 전달하는 인터페이스 계층입니다. 로봇 제어기 연결, IO 신호 매핑, 촬영 트리거 타이밍을 하나의 흐름으로 구성합니다.
통신 · 신호 흐름
촬영 요청 → 비전 처리 → 좌표 전달 → 로봇 Pick → 결과 확인 순서로 신호가 연결됩니다. 명령어 기반 제어와 IO 통신 방식 모두 지원합니다.
AimFactoryCore와의 연동
AimFactoryCore의 Recipe·Pick 검증·모델 변경 운영이 RoboInterface를 통해 로봇·PLC와 연결됩니다. 아래 실제 동작 영상에서 명령어 제어와 IO 통신 테스트를 확인하세요.
실제 제어 동작 영상
명령어 기반 제어 및 IO 통신 연결을 실제로 확인하세요.
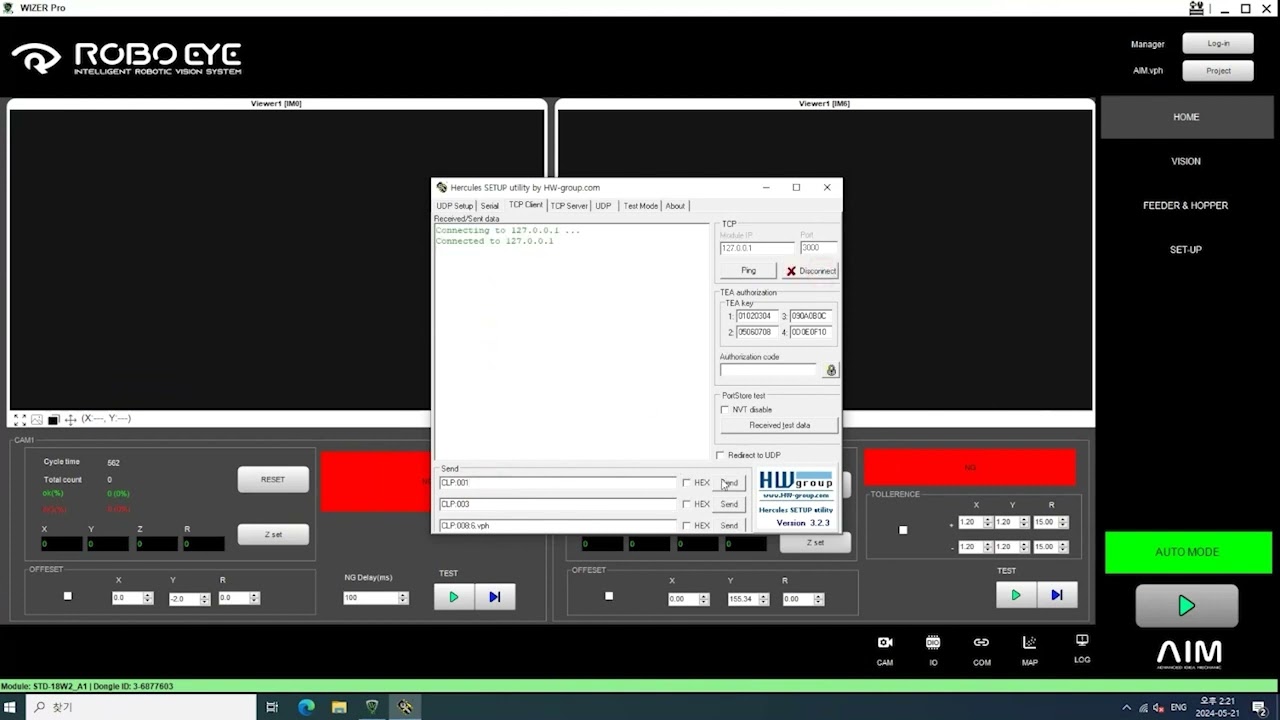
명령어 제어 (시작/정지/모델 변경)
외부 명령어로 비전·피더 시작·정지 제어
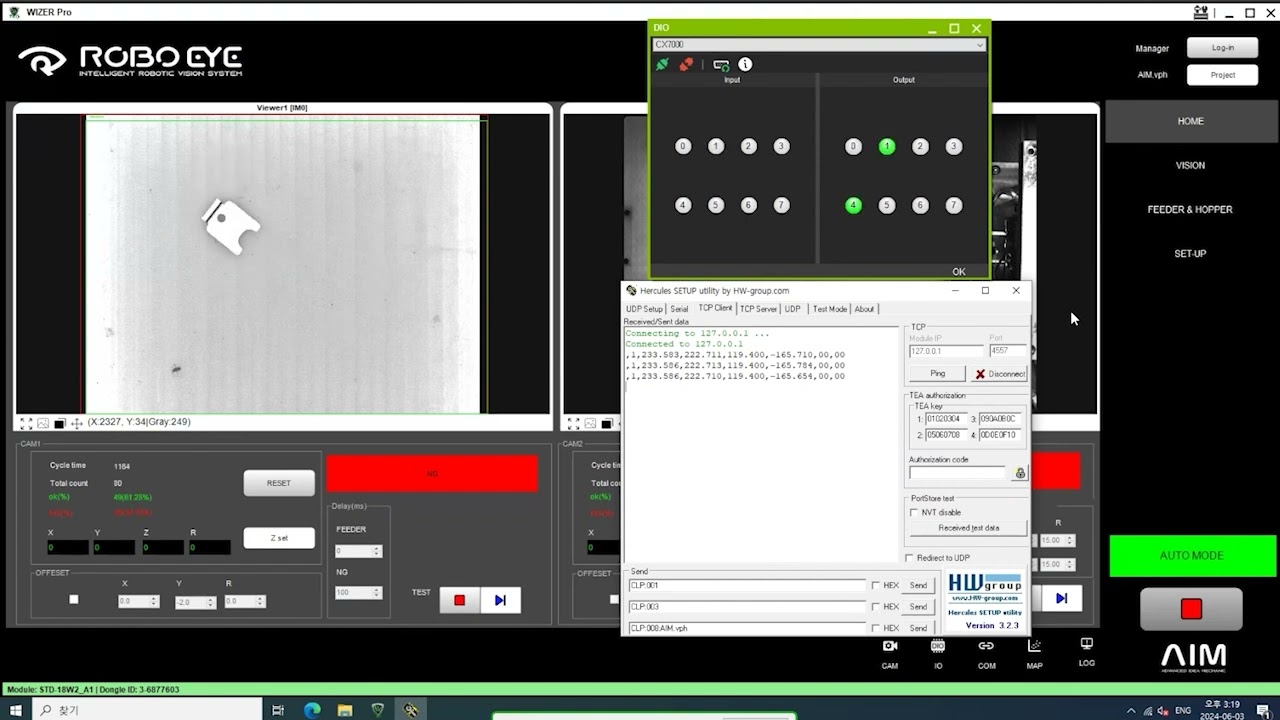
Cam 1 IO 통신 테스트
카메라·IO 신호 연결 테스트 (단일 카메라)
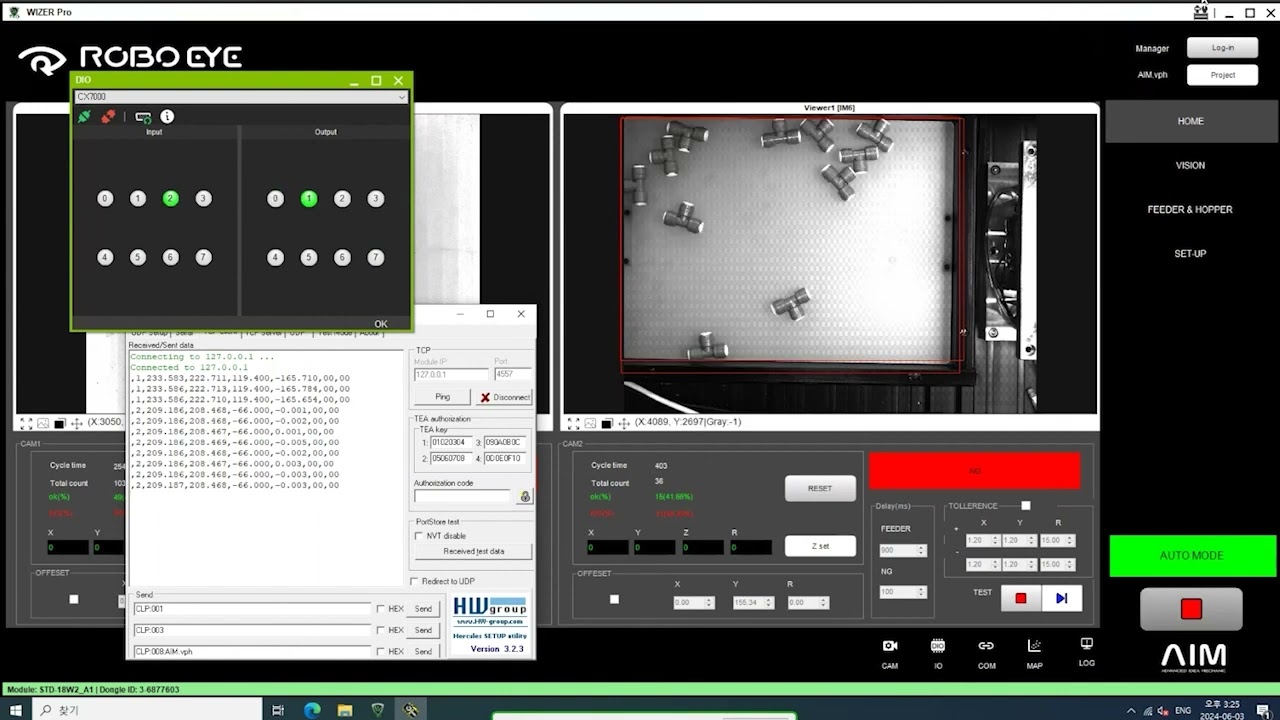
Cam 2 IO 통신 테스트
듀얼 카메라 IO 신호 연결 테스트
관련 기술 · 솔루션
통합 플랫폼 관점의 전체 연결은 통합 플랫폼 페이지 에서 함께 확인할 수 있습니다.