Recipe 기반 모델 변경
제품별 피더 조건, 비전 조건, 로봇 Pick 조건을 Recipe로 묶어 관리합니다. 모델 변경 시 관련 조건을 함께 불러옵니다.
MULTI-MODEL
비전·로봇·피더 조건을 한 Recipe로 묶어 5분 만에 모델을 전환합니다. 작업자는 모델 이름만 선택하면 비전·로봇·피더가 함께 바뀝니다.
모델 전환 시간
Recipe = 비전+로봇+피더
수십 모델 동시 운영
전환 후 정합 유지
WHY
모델이 바뀔 때마다 비전 조건, 로봇 경로, 피더 패턴을 각자 다시 맞춰야 한다면 운영이 흔들립니다. AIM은 셋업 단계부터 이 조건들을 하나로 묶어 모델 전환을 안정화합니다.
기존 방식
비전 엔지니어, 로봇 엔지니어, 피더 엔지니어가 각자 조건을 다시 맞춥니다. 30분~2시간 멈춥니다.
AIM 방식
비전·로봇·피더 조건이 한 Recipe로 묶입니다. 작업자가 모델만 선택하면 모든 조건이 자동 로드됩니다.
결과
검증 사이클을 포함해도 5분이면 양산을 재개합니다. 모델이 늘어도 운영이 안정적입니다.
RECIPE
작업자가 알아야 할 건 4가지뿐입니다. 그 안의 세부 조건은 AimFactoryCore가 알아서 관리합니다.
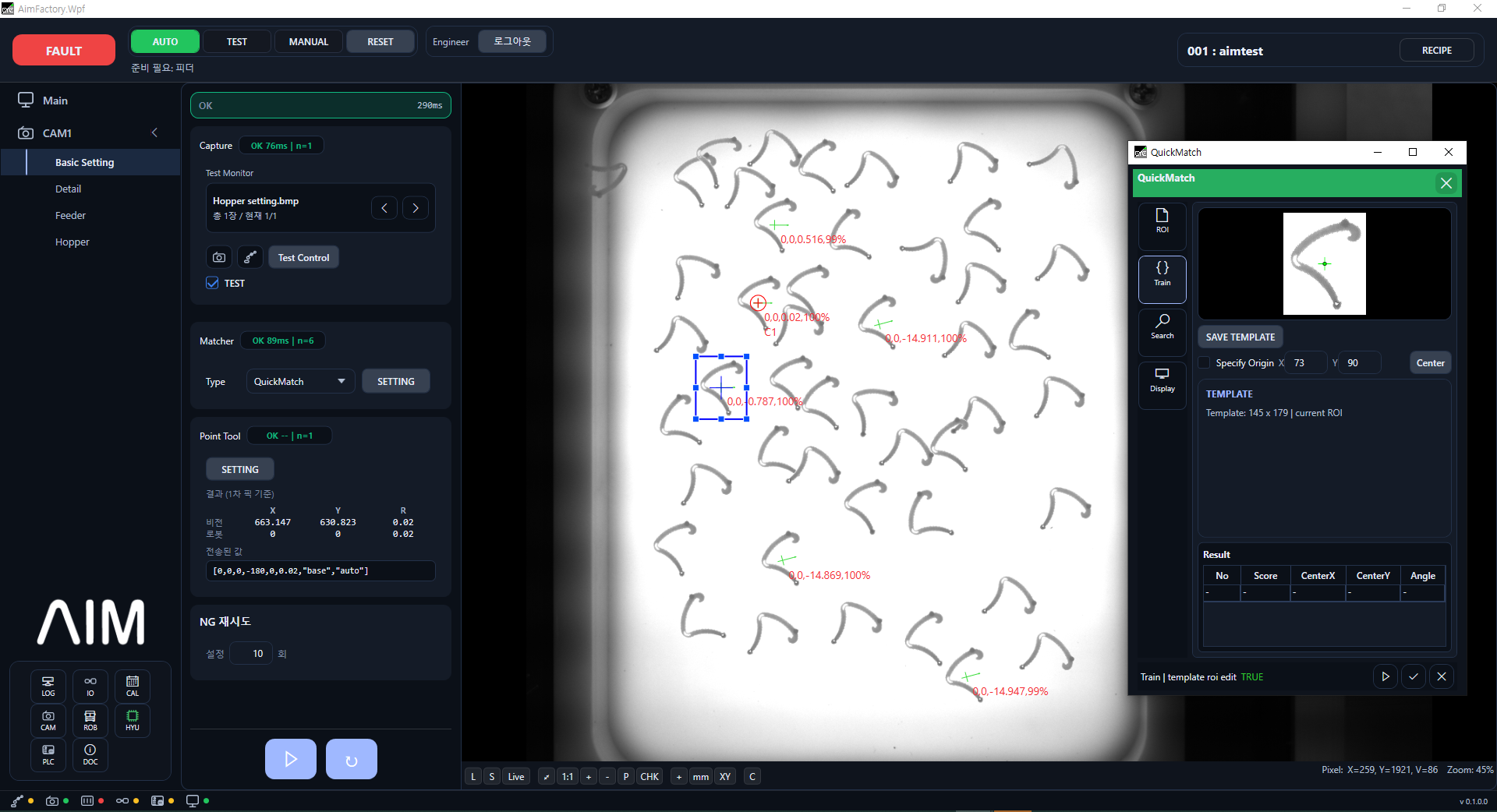
이 모델은 어떻게 보고 어디를 Pick할지
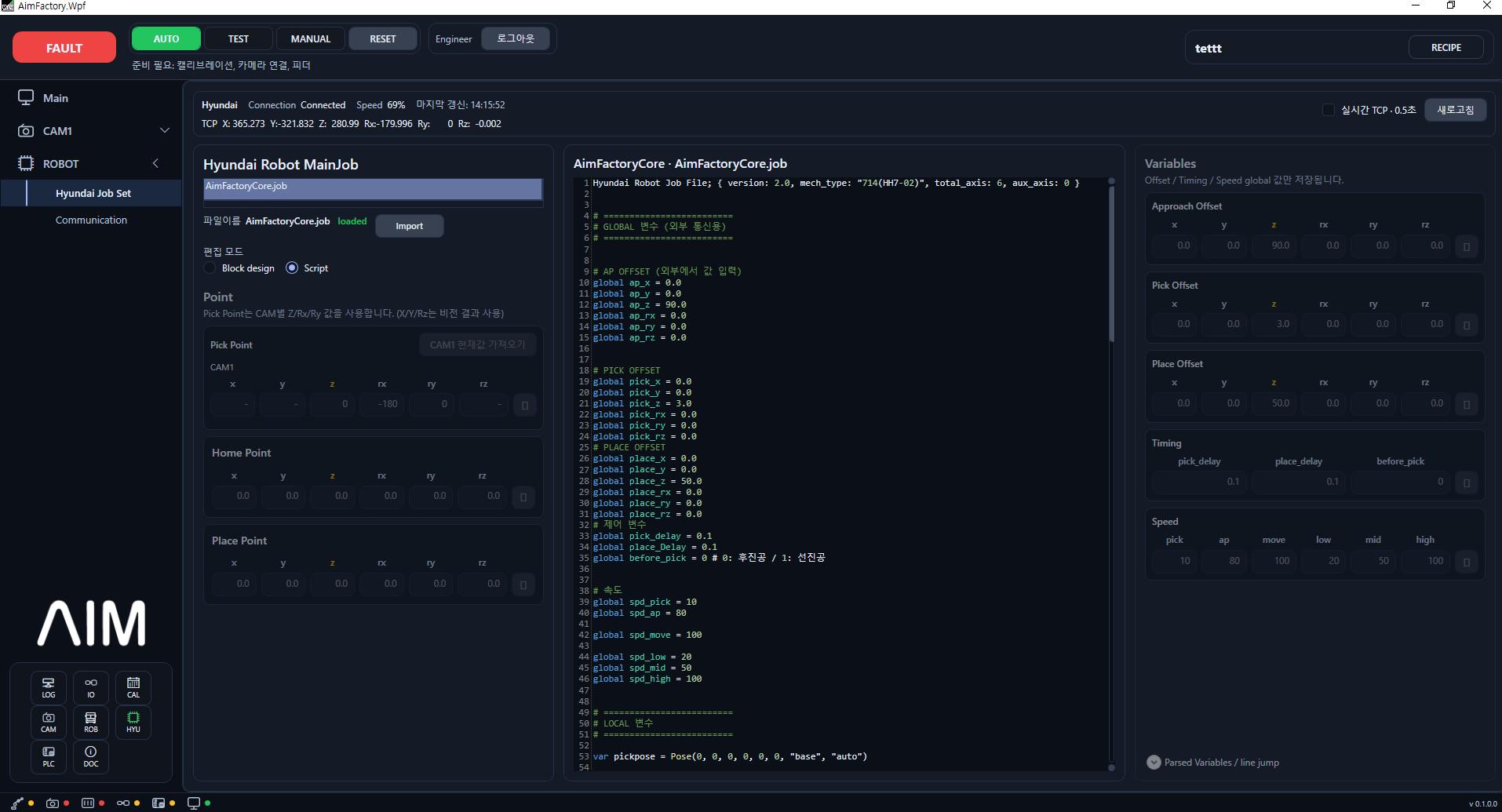
어떤 자세로 접근해 어디로 옮길지
부품을 어떻게 분산하고 공급할지
사이클·에러·표시 정보를 어떻게 다룰지
FLOW
모델 선택부터 양산 재개까지 — 작업자가 따라가는 4단계입니다.
AimFactoryCore 운영 화면에서 모델을 선택합니다. 작업자는 모델 이름만 알면 됩니다.
HMI → PLC → Robot → Vision → Feeder로 Recipe가 자동 로드됩니다. 수동 변경 작업 없음.
테스트 부품 한두 개로 인식·픽업·배치를 확인합니다. 실패 시 표시·복구.
정합·재현성이 확인되면 양산 운영을 재개합니다. 작업자 교대도 같은 흐름.
OPERATION
Recipe 선택, 비전 셋업, 로봇 프로그램이 한 운영 화면 안에 있습니다. 작업자가 화면을 바꿔가며 조작할 필요가 없습니다.
통합 운영
AIM은 제품별 Recipe를 기준으로 피더 조건, 비전 인식, 로봇 좌표, PLC/Robot 신호를 하나의 운영 흐름으로 연결합니다.
제품을 바꾸면 필요한 조건을 함께 불러오고, 운영 중에는 어느 단계에서 문제가 생겼는지 흐름 기준으로 확인할 수 있습니다.
AimFactoryCore Operation
Product B Recipe
Product B Loaded
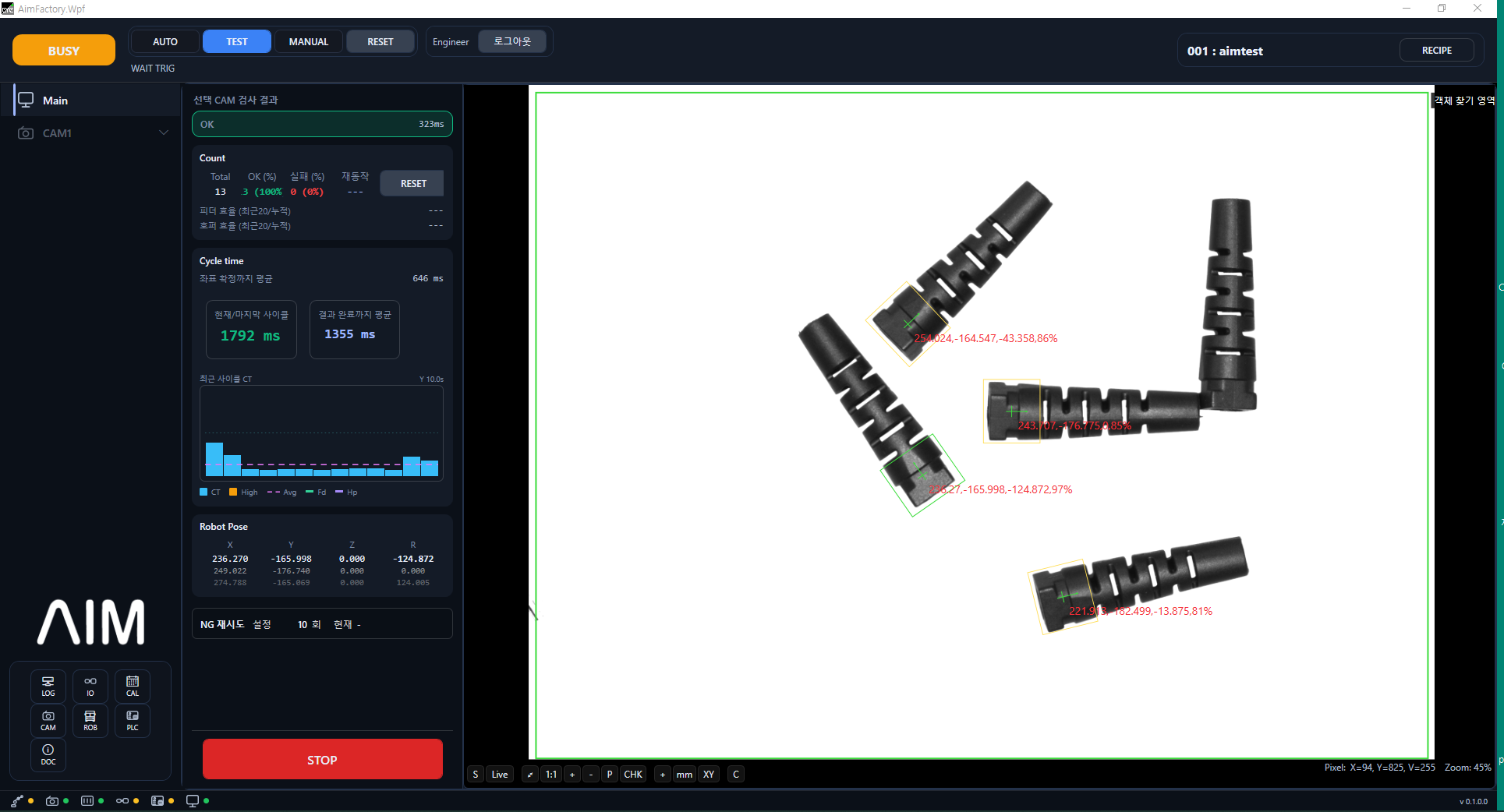
Model B / Score 86 / Pick OK
Vibration 58 / Supply OK
Ready → Trigger → Done
Position OK / Overlap Clear
Guidance Flow
제품별 피더 조건, 비전 조건, 로봇 Pick 조건을 Recipe로 묶어 관리합니다. 모델 변경 시 관련 조건을 함께 불러옵니다.
비전 인식 결과를 로봇이 사용할 수 있는 좌표와 Pick 기준으로 연결합니다. 좌표 정합과 위치 보정 흐름을 운영 화면 안에 포함합니다.
피더 동작, 공급 상태, Robot/PLC 운전 신호를 생산 순서에 맞춰 연결합니다. Ready, Trigger, Done, Error 흐름을 현장 기준으로 정리합니다.
셋업, 모니터링, Pick 가능 여부, 오류 원인 확인을 한 화면에서 이어갑니다. 교육 영상과 원격 지원으로 현장 운영을 돕습니다.
DEMO
현대로봇 × AIVE — 한 셀에서 여러 부품·피더를 통합 제어한 사례.
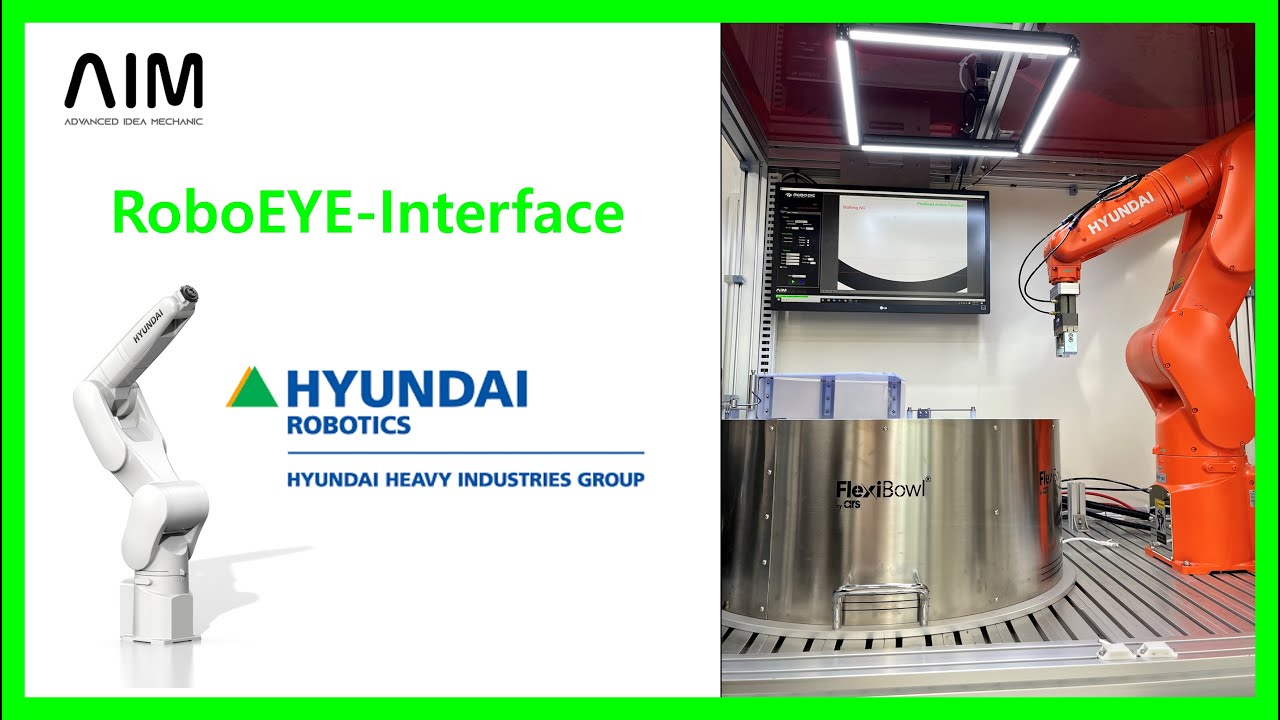
현대로봇 × AIVE 플렉시블 피더 완전 제어
ROBOEYE 2D 비전으로 플렉시블 피더·Flexibowl을 통합 제어한 실제 Pick & Place 자동화 사례입니다.
START
현재 운영 중인 모델 수와 전환 시간을 알려주시면 Recipe 구조를 함께 검토해드립니다.