HOW IT WORKS
플렉시블 피더 작동 원리 분산 × 인식 × 정합
핵심은 '랜덤 분산 × 비전 인식 × 좌표 정합(±0.05~0.1 mm)'. 진동 플레이트로 부품을 흩어주고, 카메라가 중심/각도를 인식한 뒤 로봇 좌표계로 변환하여 안정적으로 픽업합니다. 사양 산정과 셀 설계 시 필수 개념을 확인하세요.
PROCESS
벌크 → 픽업까지, 5단계 흐름
플렉시블 피딩은 진동 기반 분산과 비전 인식, 좌표 정합을 표준화한 피딩 방식입니다. 각 단계마다 표준화된 파라미터를 Recipe로 저장해 모델 변경 시 일괄 전환됩니다.
-
 1 벌크(Bulk)
1 벌크(Bulk)부품이 무작위로 섞여 있는 상태에서 시작합니다.
-
 2 투입(Feed)
2 투입(Feed)호퍼/트레이로 피더에 공급해 정량을 유지합니다.
-
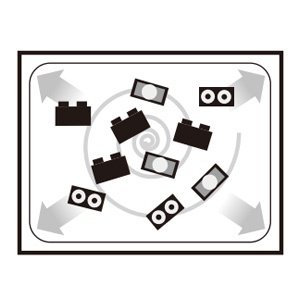 3 분산(Spread)
3 분산(Spread)진동 패턴으로 펼쳐 겹침·간섭을 줄입니다.
-
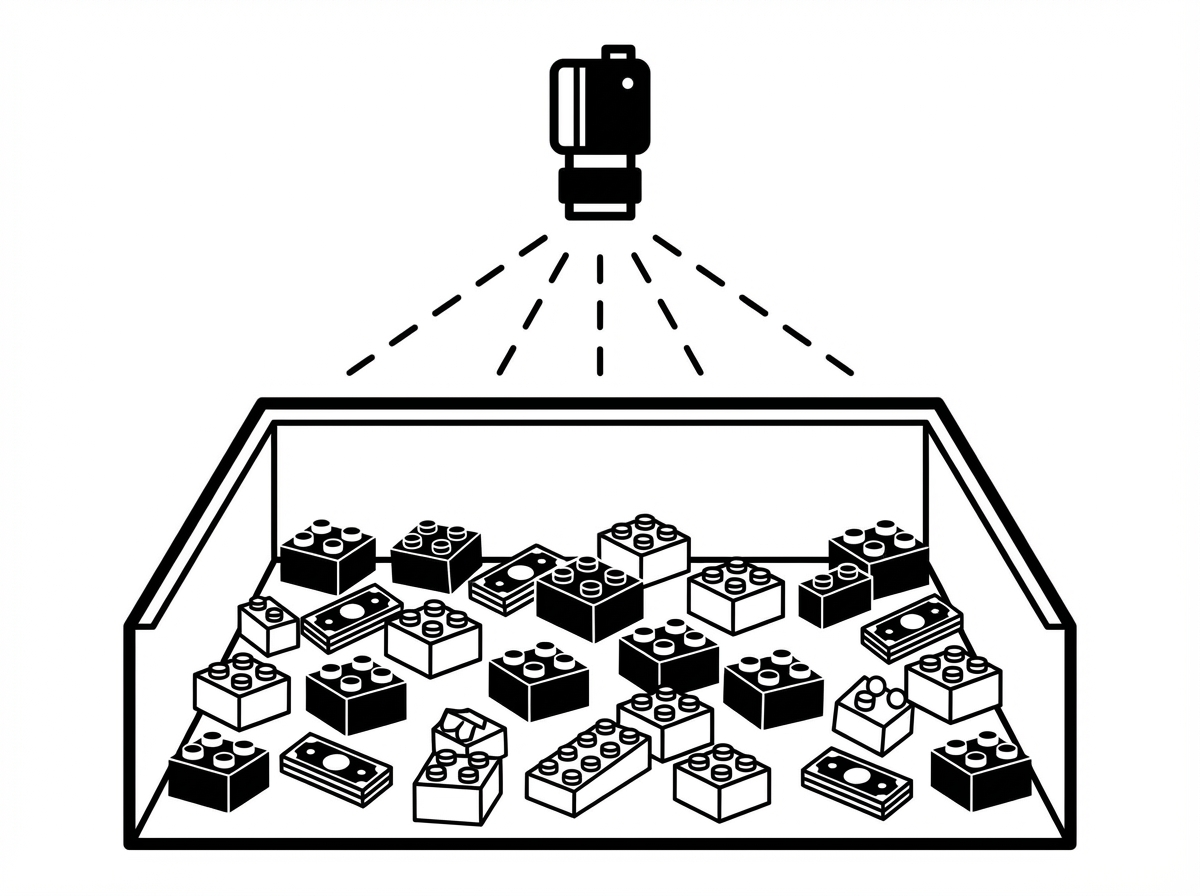 4 인식(Detect)
4 인식(Detect)비전이 자세·중심 좌표·간섭을 계산합니다.
-
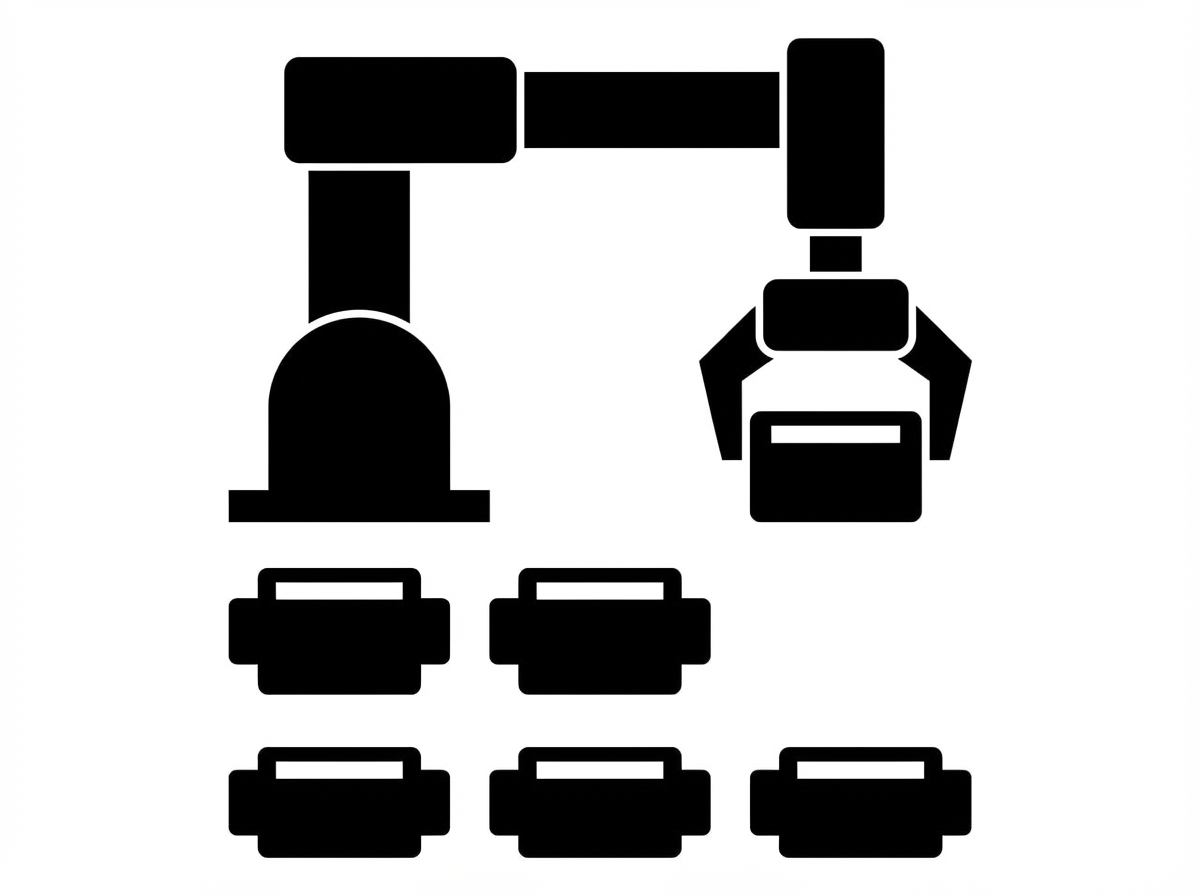 5 픽앤플레이스
5 픽앤플레이스정합된 좌표로 로봇이 픽업·배치합니다.
±0.05~0.1 mm
카메라–로봇 좌표계 보정(캘리브레이션)으로 픽업 오차를 최소화합니다. 표준 셀 기준 ≥ 9 포즈 샘플과 잔차/재현성 검증을 거칩니다.
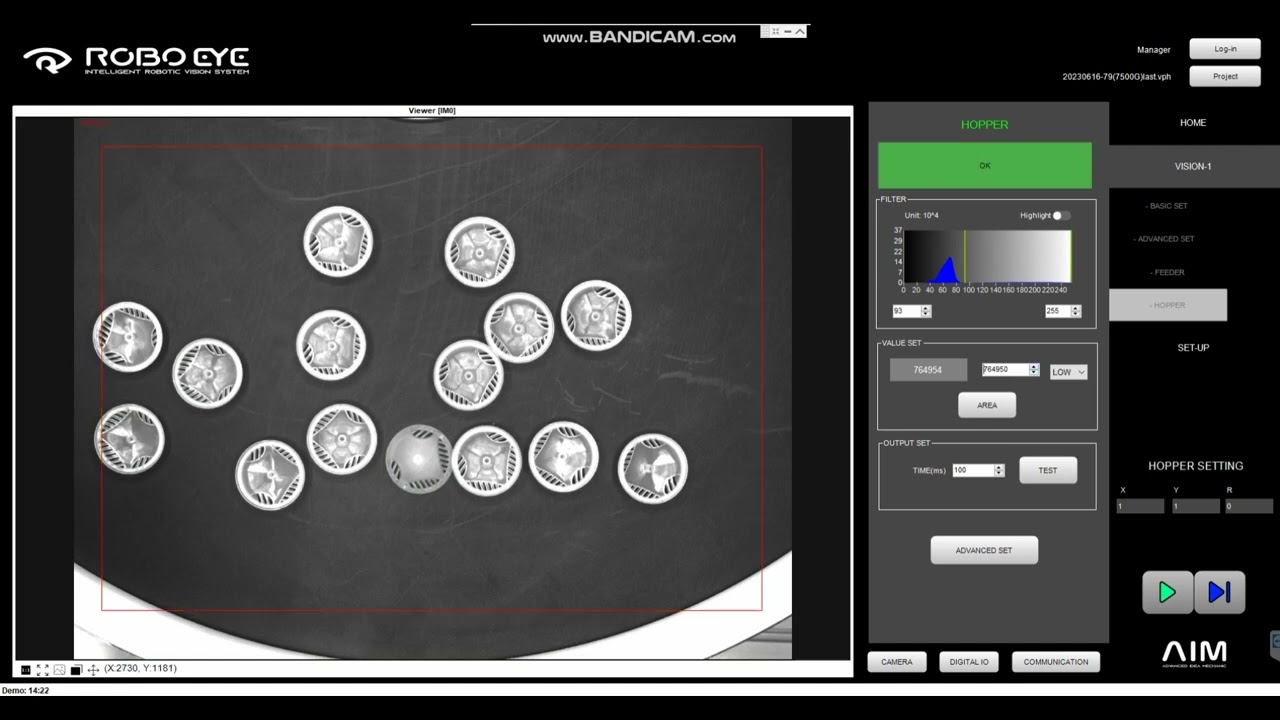
비전 빈피킹 파이프라인 — 실제 화면
카메라 선택·조명 제어·제품 등록(영역/그랩/픽업/셋팅)·간섭 검사까지의 실제 작업 흐름을 영상으로 확인하세요.
좌표 정합(캘리브레이션) — 절차 & 검증
카메라–로봇 좌표계를 보정하여 픽업 오차를 최소화합니다. 표준 셀 기준 ±0.05~0.1 mm 정합을 목표로 합니다.
추가 보기
정합 기준(예시)
| 항목 | 기준 |
|---|---|
| 정합 정확도 | ±0.05~0.1 mm |
| 샘플 포즈 | ≥ 9 poses (분산 배치) |
| 검증 방식 | 잔차/재현성 확인 |
레시피 & 5분 전환 — HMI→PLC→Robot→Vision
전환 요청 후 약 30초 내에 HMI–PLC–로봇–비전으로 순차 명령이 전달되고, 사전 등록된 레시피(진동/비전/픽업 파라미터)가 자동 로드됩니다.
HMI
레시피 선택·전환 요청
PLC
시퀀스/인터록 확인
Robot
오프셋·툴·경로 로드
Vision
카메라·노출·템플릿 로드
AIVE 플렉시블 피딩 — 정밀 진동 제어 데모
DEMO LIBRARY
실제 동작 영상
AIVE 플렉시블 피딩 시스템의 운영·호퍼 동작·다품종 부품 공급 영상.
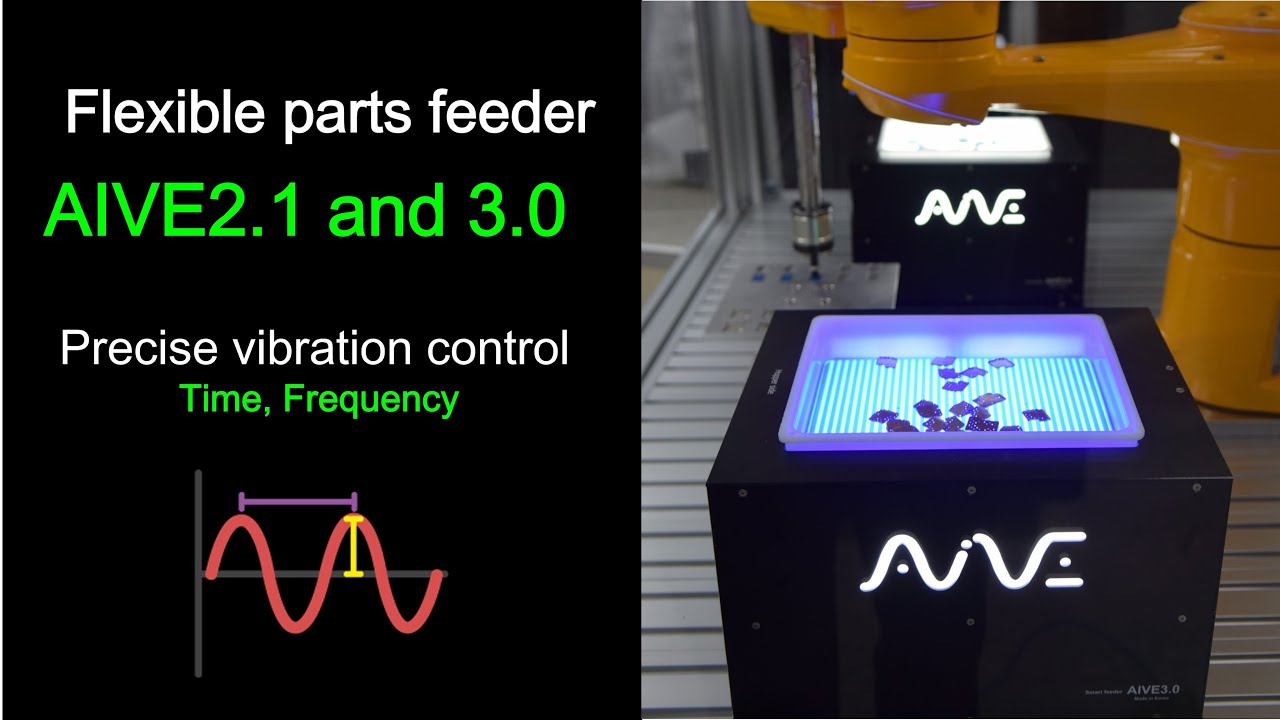
AIVE 플렉시블 피딩 시스템 소개
직접 위치 제어와 픽업 높이 자동 조절 기술로 다품종 부품 공급을 구현합니다.
Flexible Feeder AIVE 개요
누구나 쉽게 사용하는 플렉시블 피딩 시스템의 구성과 운영 방법을 소개합니다.
호퍼 동작 — Hopper Operation
AIVE 호퍼의 투입·자동 공급 동작을 실제 설비에서 확인합니다.
적용 사례
전자 부품
0.3 mm 칩 부품 피딩 / 전환 시간 70% 단축
의료 기기
임플란트 자동 조립 / 불량률 0.1% 달성
자동차 부품
커넥터 조립 / UPH 30% 향상
FAQ
플렉시블 피더 원리 — 자주 묻는 질문
플렉시블 피더란 무엇인가요? +
플렉시블 피더의 전환 시간이 정말 5분인가요? +
플렉시블 피더는 어떤 로봇과 호환되나요? +
플렉시블 피더와 기존 진동 볼피더의 차이는? +
AIM 플렉시블 피더의 설치 시간은? +
원리를 확인했다면, 실제 부품으로 검증해보세요.
실제 부품 샘플로 분산·인식·정합 가능성을 검증하고 도입 가능성을 함께 검토합니다.