INTEGRATION
로봇·비전·피더를 하나의 플랫폼에서 운영합니다.
AIM의 통합 구조는 HMI·PLC·Robot·Vision·Feeder 5 레이어가 정해진 책임으로 신호를 주고받는 방식입니다. 로봇은 IO로 타이밍만 받고, 비전이 촬영·분석·주변장치 제어를 일괄 수행합니다. 모델이 바뀌면 Recipe 한 번으로 모든 파라미터가 함께 전환됩니다.

HMI·PLC·Robot·Vision·Feeder 5 레이어 통합 제어
LAYERS
5 레이어 — 각자의 역할이 분리되어 있습니다.
각 레이어의 책임을 명확하게 분리하면, 모델이 바뀌어도 흐름이 단순해지고 문제 발생 시 어디서 멈췄는지 빠르게 파악할 수 있습니다.
- LAYER 1
HMI
운영자 인터페이스
AimFactoryCore 운영 화면. 모델 선택과 Recipe 전환 요청, 상태 모니터링을 담당합니다.
- 모델/Recipe 선택
- 전환 명령 트리거
- 상태·이벤트 모니터링
- 수동 조작·복구
- LAYER 2
PLC
시퀀스·인터록
라인 안전과 시퀀스 흐름을 관장합니다. 비전·로봇·피더 사이의 동기화 신호와 인터록을 처리합니다.
- 시퀀스 제어
- 인터록·세이프티
- IO 트리거 분배
- 에러·알람 집계
- LAYER 3
Robot
동작·좌표
비전이 전달한 Pick 좌표를 받아 동작합니다. 오프셋·툴·경로는 모델별 Recipe에서 로드됩니다.
- Pick·Place 동작
- 오프셋·툴 로드
- Z·접근 경로 적용
- Pick 후 검증
- LAYER 4
Vision
인식·정합
카메라 촬영, 부품 인식, 좌표 정합까지 한 모듈에서 처리합니다. 주변장치(조명·트리거)도 비전이 직접 제어합니다.
- 촬영·노출
- ROI·매칭
- 이미지→로봇 좌표 변환
- Pick 후보 우선순위
- LAYER 5
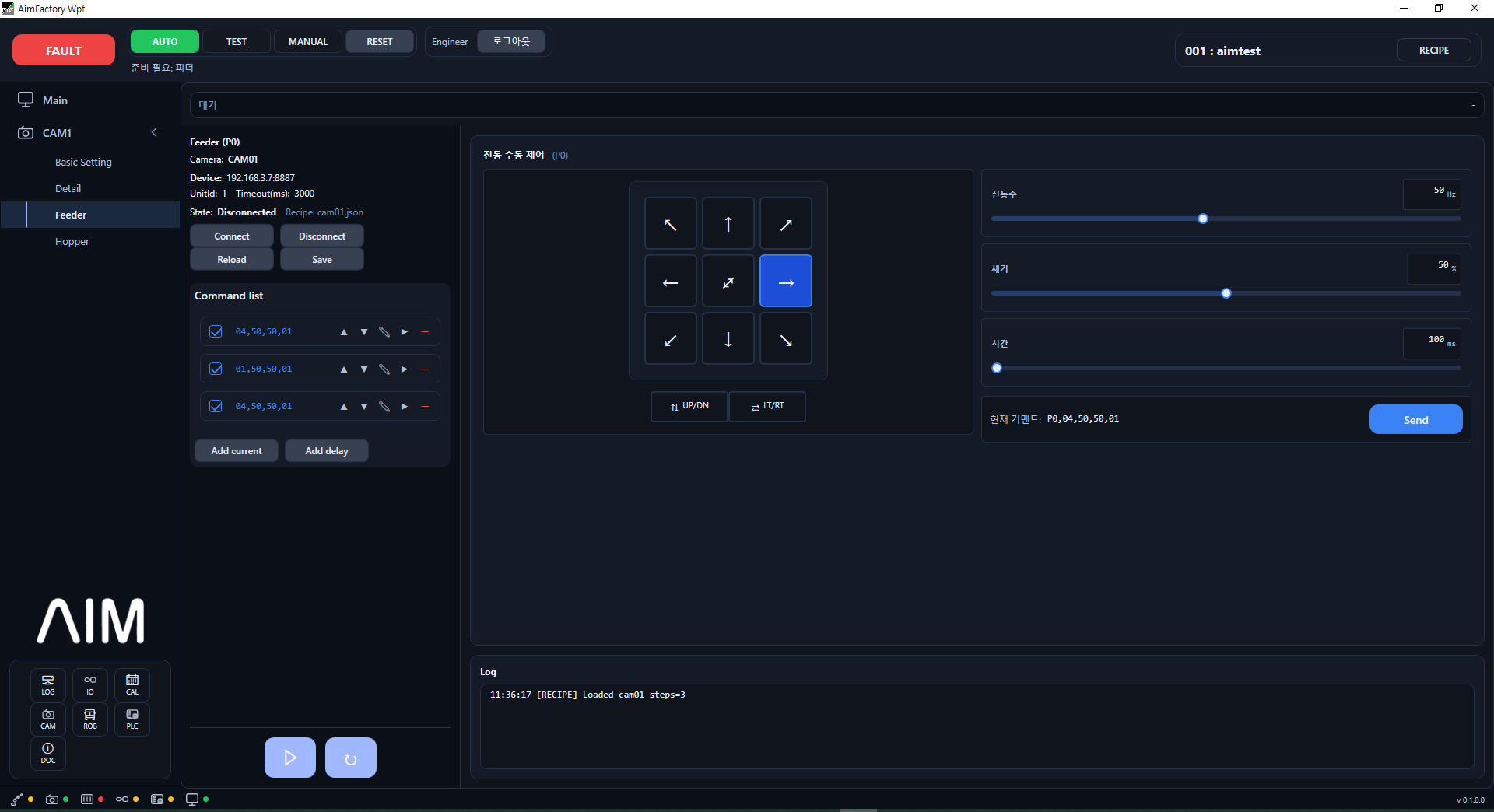
Feeder
공급·분산
AIVE 진동 또는 FlexiBowl 회전으로 부품을 펼치고 픽업 가능한 상태로 유지합니다. 호퍼·조명도 함께 제어합니다.
- 진동/회전 패턴
- 호퍼 자동 보충
- 백라이트 제어
- 조도·간섭 관리
SIGNAL FLOW
모델 전환 → Pick 완료까지, 신호 흐름
HMI에서 모델을 바꾸면, 아래 6단계 시퀀스로 신호가 전파됩니다. 각 단계마다 무엇이 어디로 전달되는지 알면 라인 디버깅이 단순해집니다.
- 1 HMI → PLC
Recipe 전환 요청 (모델 ID)
- 2 PLC → Robot · Vision · Feeder
각 레이어로 Recipe 로드 명령 전송
- 3 Vision → Feeder
조명·촬영 조건 설정, 진동 시작 요청
- 4 Feeder → Vision
부품 분산 완료 신호 (IO 또는 TCP)
- 5 Vision → Robot
Pick 좌표·자세(X·Y·θ) 전달 (TCP/IP)
- 6 Robot → PLC · HMI
Pick·Place 완료 상태 회신, 사이클 카운트 갱신
PROTOCOLS
어떤 신호가 어디서 어디로 — 통신 방식
안전·시퀀스 신호는 IO·Fieldbus, 좌표·결과 데이터는 TCP/IP — 응답 지연과 데이터 크기에 따라 통신 방식이 다릅니다.
| 레이어 쌍 | 방식 | 주요 페이로드 |
|---|---|---|
| Robot ↔ Vision | TCP/IP | Pick 좌표(X·Y·θ), 검증 결과 |
| Vision ↔ Feeder | TCP/IP (최대 2대) | 진동 패턴·조명·트리거 명령 |
| PLC ↔ Robot | IO + Fieldbus | Start·Stop·세이프티·사이클 신호 |
| PLC ↔ HMI | OPC UA / Fieldbus | Recipe ID, 알람·상태 |
| Vision ↔ 조명 | IO 트리거 | 촬영 동기 트리거 (~수 ms 단위) |
| 데이터 처리 | 비전 모듈 내부 | 이미지 → 좌표 변환 50~150 ms (예시) |
* 통신 사양은 라인·로봇 브랜드·필드버스 환경에 따라 달라질 수 있습니다. 실제 도입 시 사양서로 함께 확정합니다.
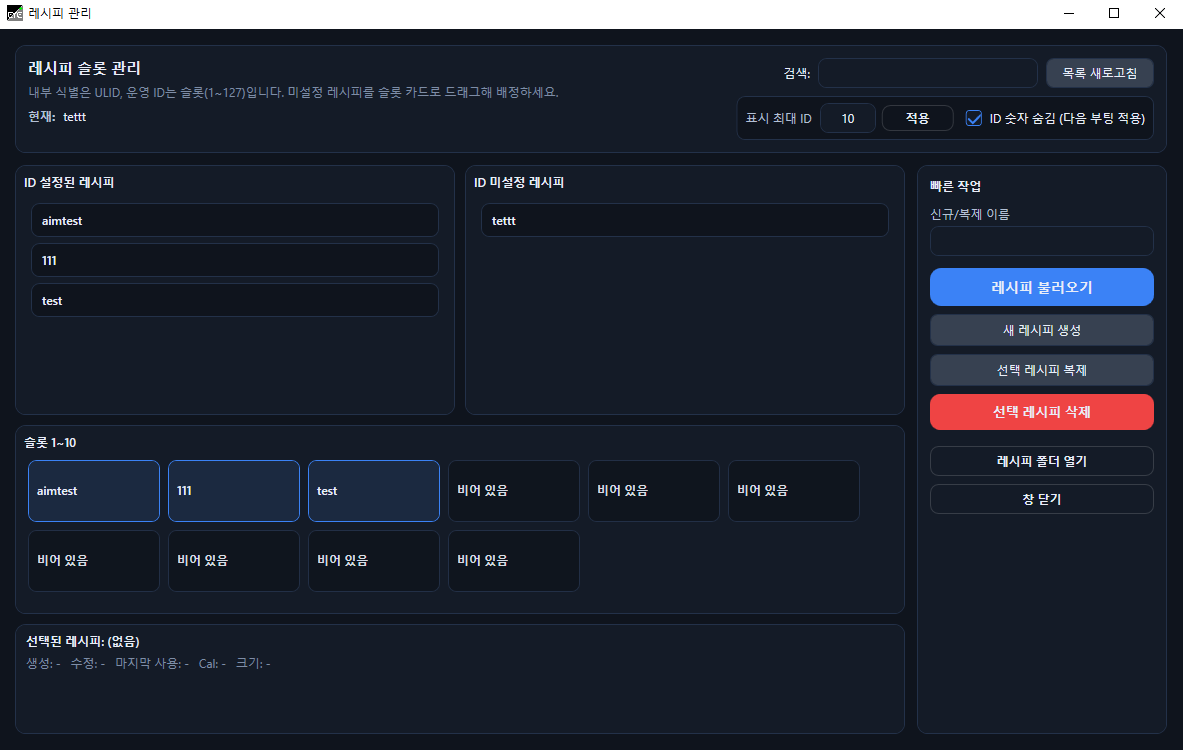
RECIPE
모델 전환 5분 — Recipe 한 번에 일괄 로드
품종 변경 시 HMI에서 모델을 선택하면 PLC→Robot→Vision→Feeder 순으로 사전 등록된 Recipe가 자동 로드됩니다. 전환 절차가 표준화되어 있어, 운영자가 매번 수동으로 셋업할 필요가 없습니다.
모델 선택
시퀀스 인터록
오프셋·툴·경로
비전·진동 조건
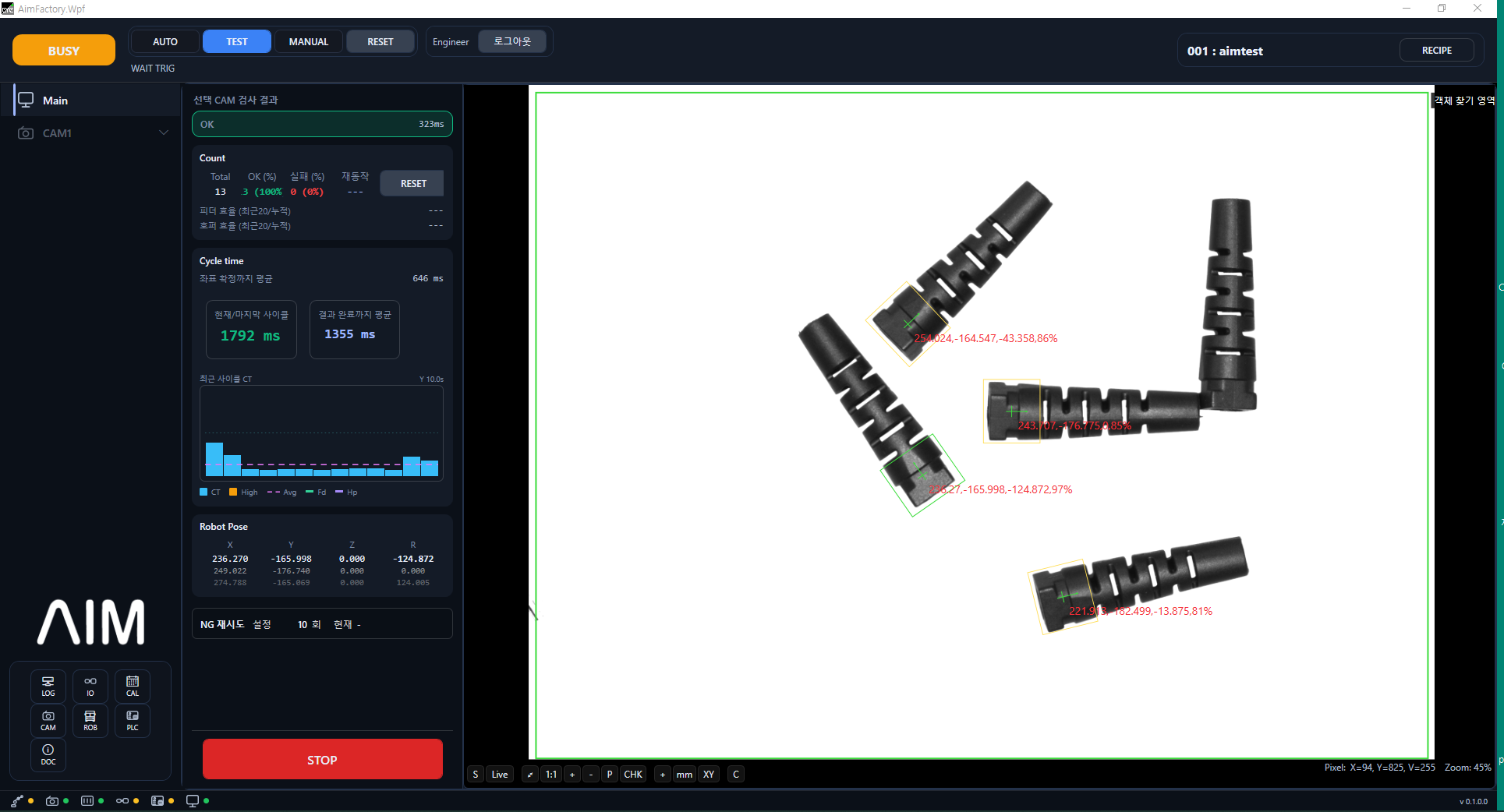
OPERATION
한 화면에서 Recipe·비전·로봇·피더를 함께 운영
AimFactoryCore는 5 레이어의 상태와 이벤트를 한 화면에 묶어 보여줍니다. 모델 변경, 좌표 조정, 신호 점검을 같은 운영 화면에서 처리합니다.

FAQ
통합 구조 — 자주 묻는 질문
로봇 비전은 일반 PLC 비전과 어떻게 다른가요? +
비전과 피더 간 통신은 어떻게 동작하나요? +
모델이 바뀔 때 어떤 파라미터가 함께 바뀌나요? +
기존 PLC·로봇 인프라와 함께 쓸 수 있나요? +
어떤 신호가 IO이고 어떤 신호가 TCP인가요? +
기존 라인과 통합 가능성, 함께 검토해드립니다.
현재 PLC·로봇·비전 인프라와 AIM 플랫폼이 어떻게 연결될 수 있는지, 신호 흐름·통신 사양 기준으로 검토드립니다.