플렉시블 피더 작동 원리
핵심은 '랜덤 분산 × 비전 인식 × 좌표 정합(±0.05~0.1 mm)'. 진동 플레이트로 부품을 흩어주고, 카메라가 중심/각도를 인식한 뒤 로봇 좌표계로 변환하여 안정적으로 픽업합니다. 사양 산정과 셀 설계 시 필수 개념을 확인하세요.
플렉시블 피더란?
플렉시블 피더는 다양한 부품을 한 장비로 공급하기 위해, 분산(진동)·인식(비전)·좌표 정합(캘리브레이션)을 표준화한 피딩 방식입니다.
다품종 생산에서 셋업/전환 부담을 줄이고, 반복 픽업의 재현성을 확보하는 데 초점을 둡니다.
플렉시블 피더 원리 요약: 벌크 → 투입 → 분산 → 인식 → 픽앤플레이스
부품은 벌크 상태로 투입되고, 분산(진동)으로 겹침을 줄인 뒤 비전이 자세/좌표를 계산합니다. 이후 정합(캘리브레이션)을 거쳐 로봇이 픽앤플레이스를 수행합니다.

5단계 도식 보기(선택) +
전체 프로세스 개요(선택) +
벌크 투입부터 로봇 픽앤플레이스까지, 표준 셀 기준의 기본 흐름입니다.

STEP 3. 분산(Spread)
진동으로 부품을 펼쳐 겹침/간섭을 줄이고, 인식이 가능한 상태를 만드는 단계입니다. 분산이 안정적일수록 이후 인식·픽업의 실패율이 줄어듭니다.
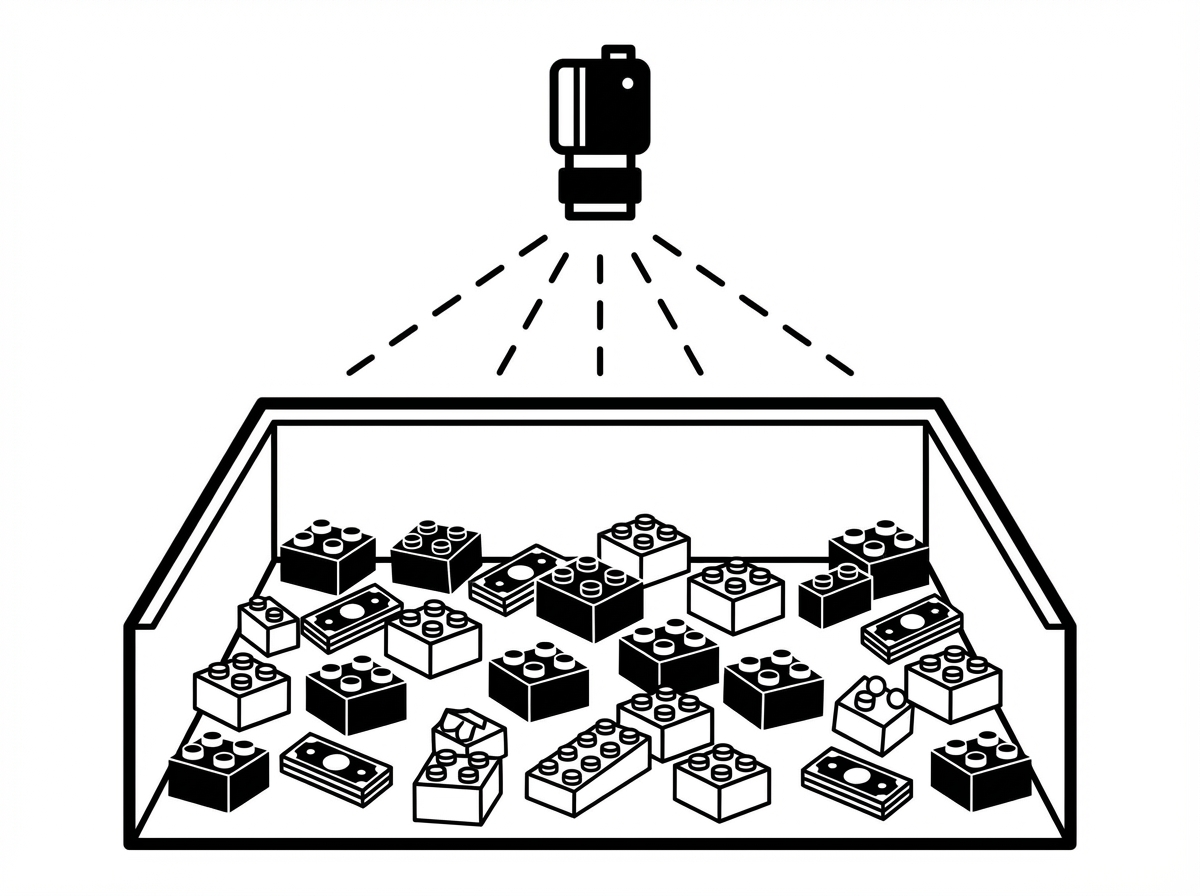
STEP 4. 인식(Detect) — 비전 파이프라인
카메라 선택·조명 제어·제품 등록(영역/그랩/픽업/셋팅)·간섭 검사까지의 실제 작업 흐름을 영상으로 확인하세요.
STEP 3. 좌표 정합(Align, 캘리브레이션)
카메라 좌표에서 계산된 픽업 위치를 로봇 좌표계로 변환해, 반복 픽업의 정밀도·재현성을 확보합니다.
심화: 캘리브레이션 & 데모 영상(선택) 열기/닫기
운영 핵심: 레시피 전환
다품종 생산의 핵심은 “전환 표준화”입니다. HMI→PLC→Robot→Vision으로 전환 절차를 단순화해 셋업 시간을 줄입니다.
레시피 & 5분 전환 — HMI→PLC→Robot→Vision 열기/닫기
전환 요청 후 약 30초 내에 HMI–PLC–로봇–비전으로 순차 명령이 전달되고, 사전 등록된 레시피(진동/비전/픽업 파라미터)가 자동 로드됩니다.
플렉시블 피더란 무엇인가요? +
플렉시블 피더의 전환 시간이 정말 5분인가요? +
플렉시블 피더는 어떤 로봇과 호환되나요? +
플렉시블 피더와 기존 진동 볼피더의 차이는? +
AIM 플렉시블 피더의 설치 시간은? +
원리(분산·인식·정합)가 실제 현장에서 어떻게 적용되는지 확인하세요.

AIVE + RoboEYE로 구현한 실리콘 부품 트레이 자동공급 (4×6 mm)
진동 피더로 불가능했던 4×6 mm 투명 실리콘 부품을 AIVE 플렉시블 피더와 RoboEYE 비전으로 완전 자동화. 홈 방향 인식·정밀 보정·기존 트레이 그대로 사용. 0% 불량, 0% 정지, 30–40 ea/min.

IAI 로봇과 AIVE & RoboEYE가 완성한 초소형 SMD 릴 테이핑 자동화
AIVE 플렉시블 피더와 RoboEYE 듀얼 카메라 비전 시스템을 IAI 초정밀 로봇과 통합하여 0.3mm 전자부품을 자동 픽업·검사·릴테이핑. 초소형 부품 정밀 제조 성공 사례.